| Autorzy: | inż. Sebastian Sosnowski |
| Promotor: | dr inż. Marcin Morawski |
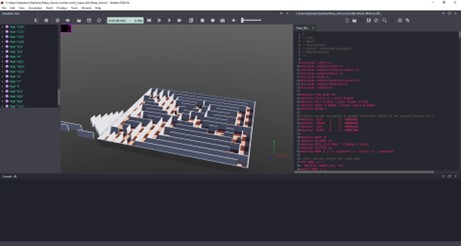
Celem pracy było opracowanie modelu robota mobilnego i oprogramowanie go w sposób umożliwiający mu automatyczne znalezienie i pokonanie właściwej drogi w labiryncie. W zakres pracy wchodziły następujące zagadnienia: przegląd literatury na temat robotów mobilnych, w szczególności tych wyszukujących drogę, wybór algorytmu do planowania drogi w labiryncie, opracowanie symulacji działania robota w środowisku Webots, napisanie w języku C programu dla symulowanego robota do realizacji zadania wyszukiwania drogi w labiryncie, zbudowanie modelu fizycznego robota mobilnego z zestawu Lego Mindstroms NXT 2.0 oraz zbudowanie labiryntu, adaptacja programu napisanego dla symulatora robota w środowisku Webots do układu sterowania fizycznego modelu robota Lego z wykorzystaniem oprogramowania ROBOTC, testy.