| Autorzy: | inż. Jakub Bochenek |
| Promotor: | dr inż. Adam Słota, prof. PK |
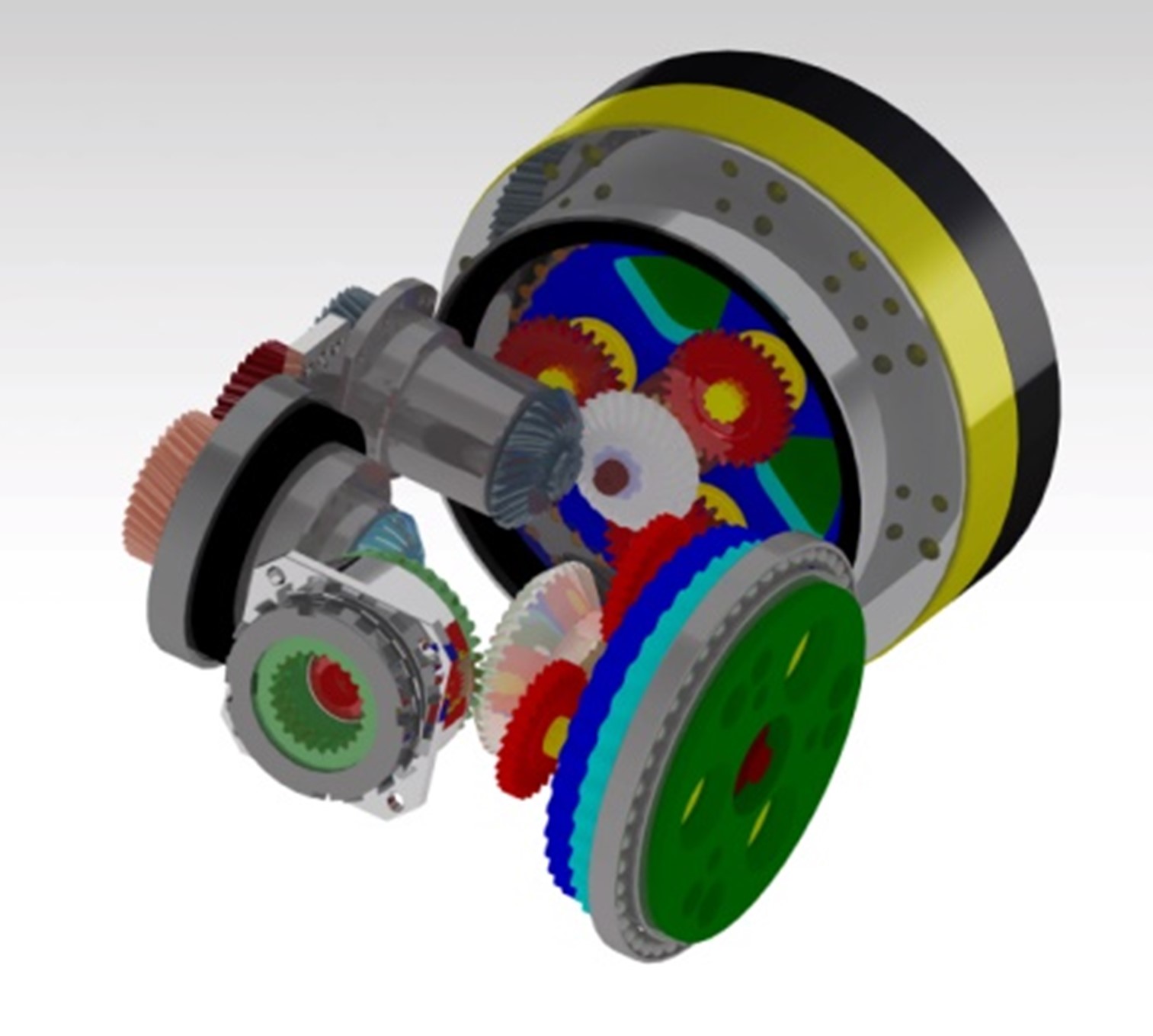
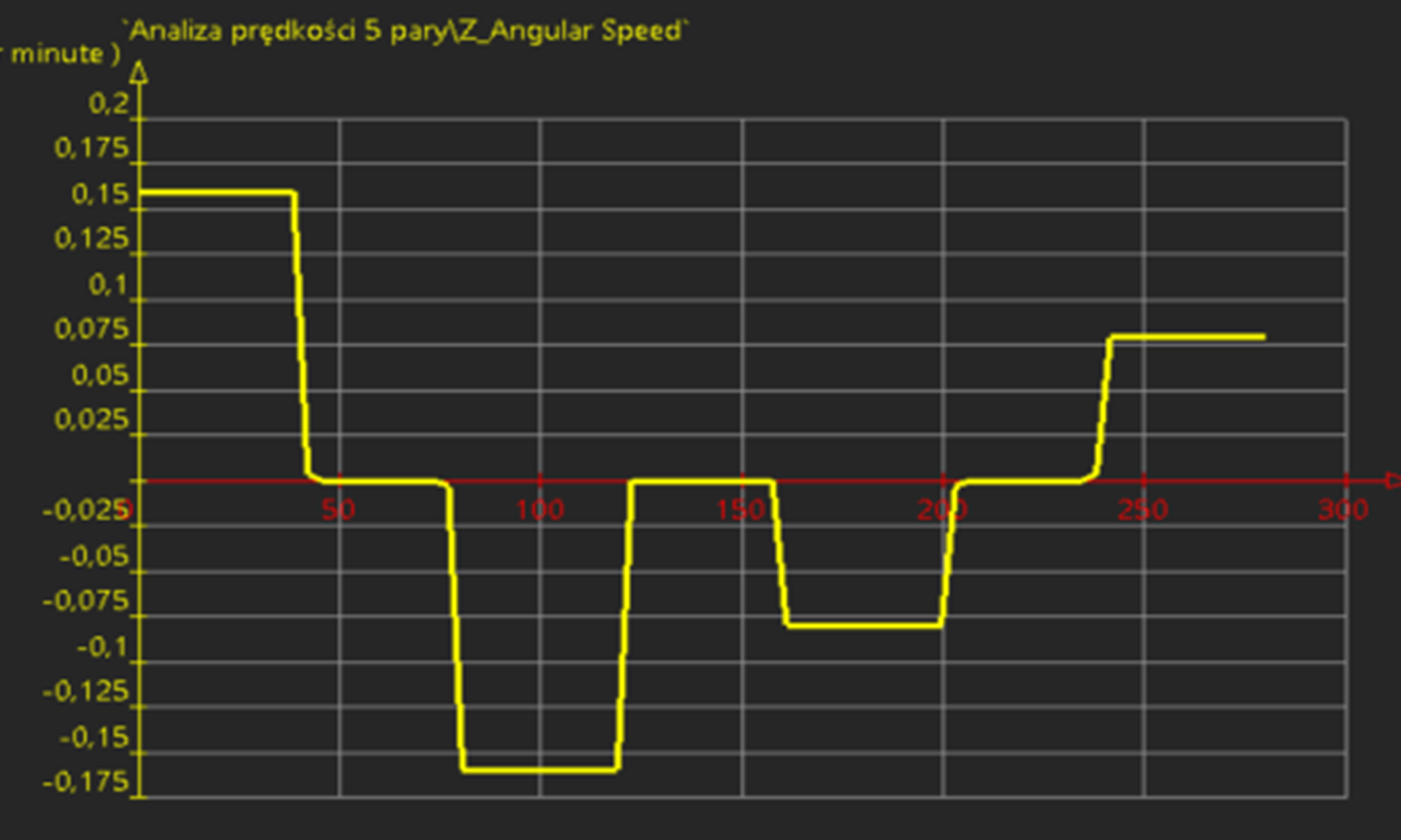
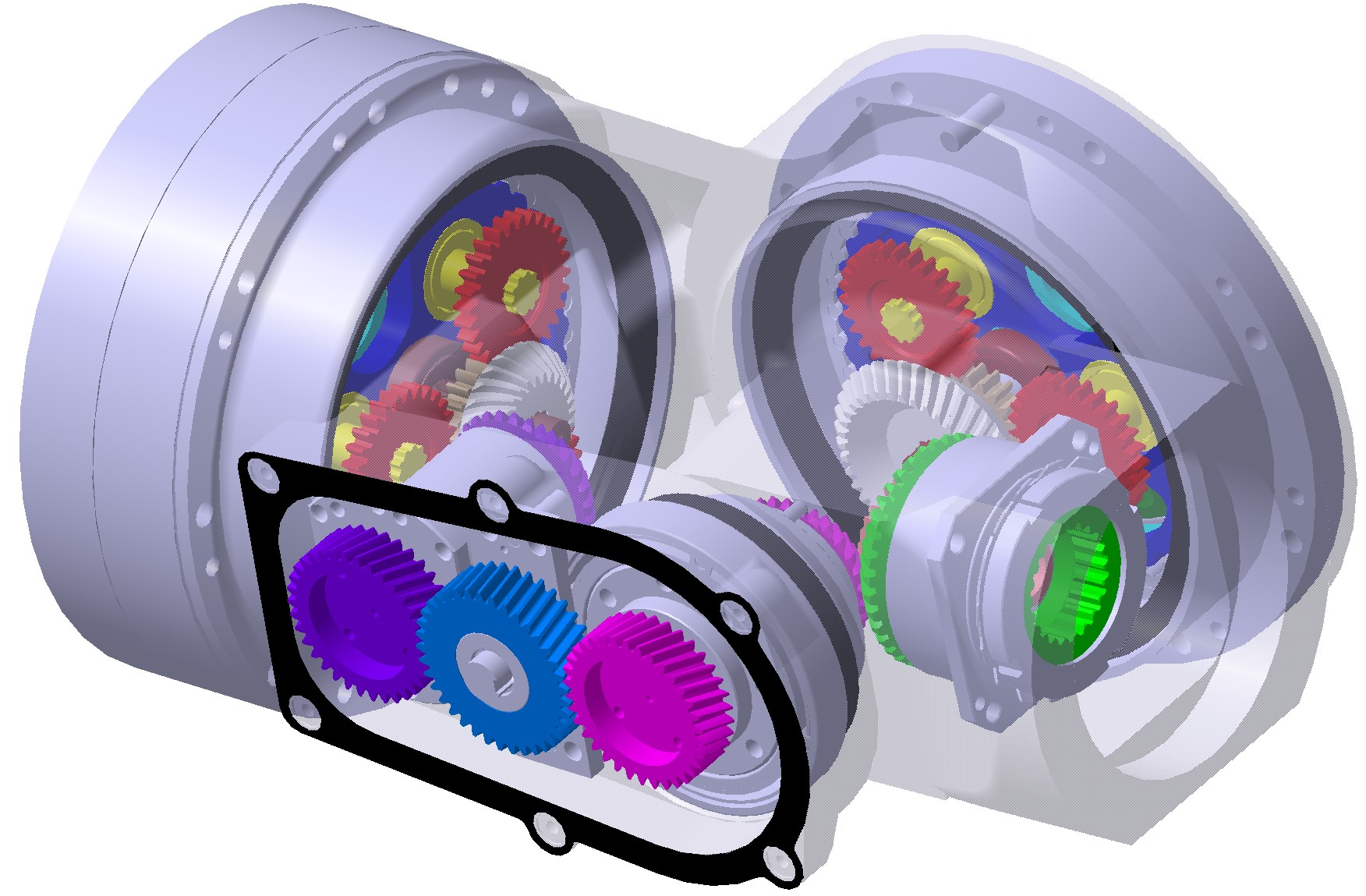
Celem pracy było opracowanie modelu i analiza kinematyczna kiści robota przemysłowego Fanuc S420f. Autor skorzystał z gotowych modeli pojedynczych części kiści. Opracował połączenia kinematyczne mechanizmu przeniesienia napędu od ramienia robota do piątej i szóstej osi korzystając z modułu DMU kinematics programu Catia v5. Dla mechanizmów kiści wykonano stosowne obliczenia przełożeń poszczególnych przekładni, w tym przekładni cykloidalnej, i całkowitego przełożenia łańcucha kinematycznego. Uzyskane wyniki zostały zweryfikowane z wykorzystaniem modelu wirtualnego w programie Catia v5. Ważną część pracy stanowi opracowana wizualizacja działania kiści zwiększając walory dydaktyczne pracy.