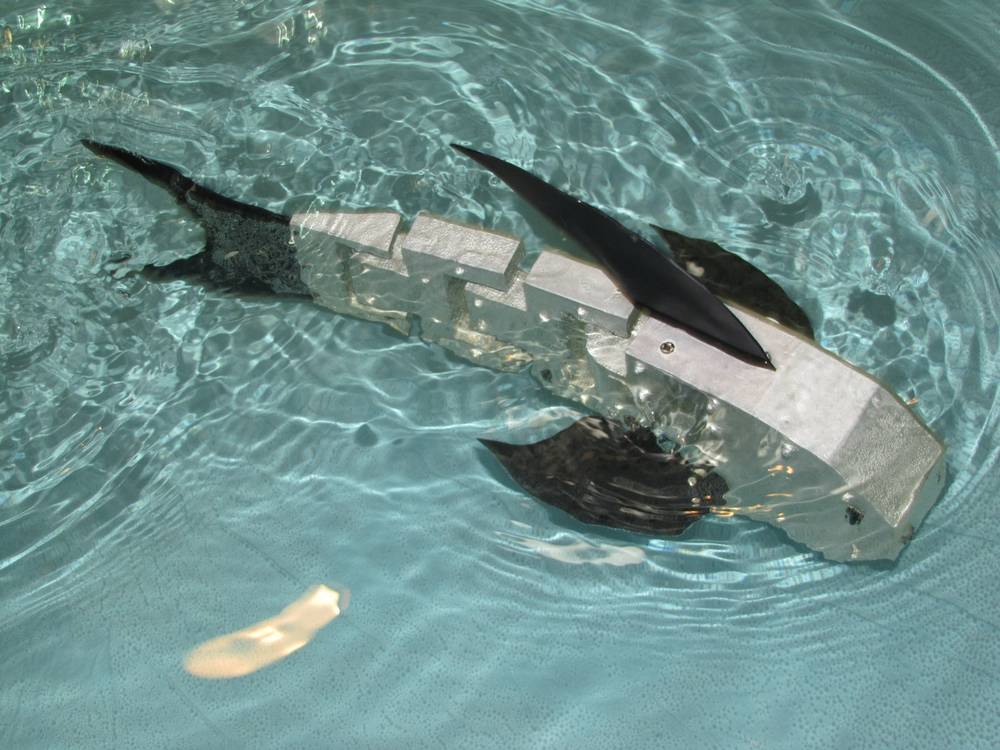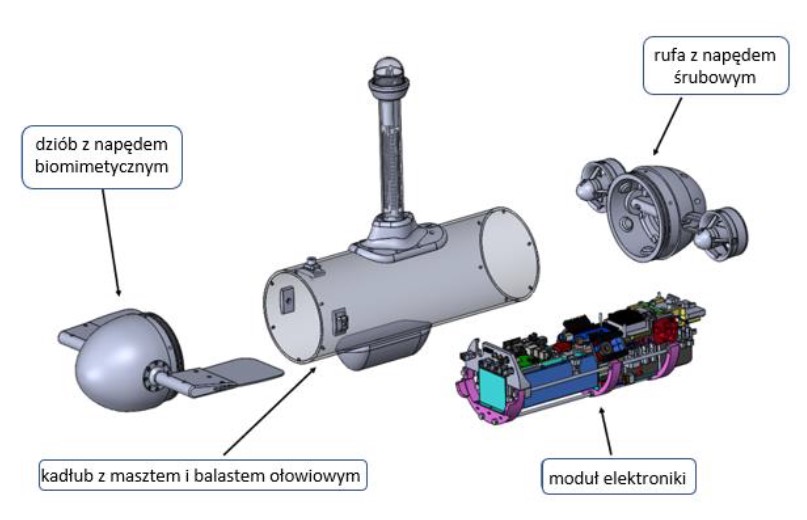
Projekt i budowa hybrydowego pojazdu podwodnego
Autorzy: mgr inż. Tomasz Talarczyk Promotor: dr inż. Marcin Malec Podwodny świat nie jest środowiskiem łatwym do życia i eksploracji. Na dzień dzisiejszy większą wiedzę mamy na temat kosmosu i wszechświata niż na temat mórz i oceanów, które zajmują ponad