Doktorant z Katedry Inżynierii i Automatyzacji Produkcji laureatem Nagrody Specjalnej Rektora Politechniki Świętokrzyskiej w konkursie „Student–Wynalazca” 8 października 2025 czytaj więcej »
Studenci koła naukowego Automatyki i Robotyki czwarty raz zdobywają finansowanie w projekcie FutureLab PK 22 marca 2024 czytaj więcej »
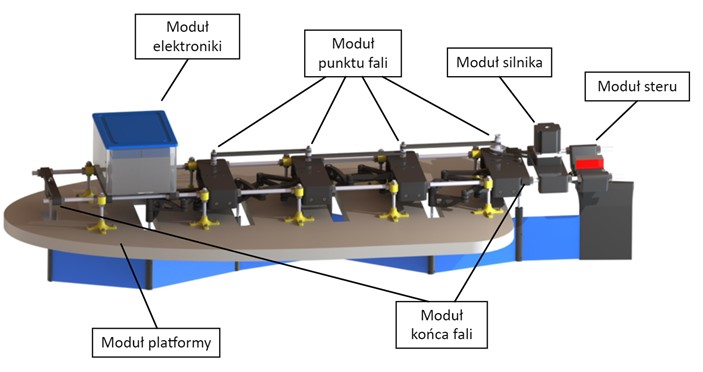
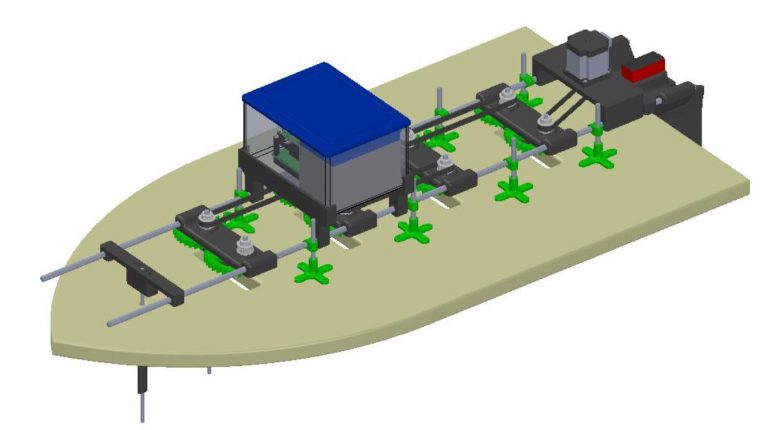
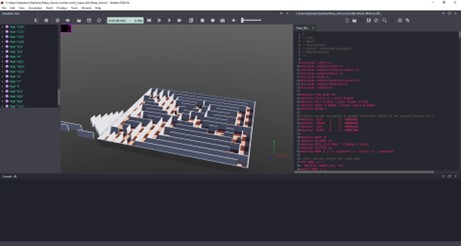
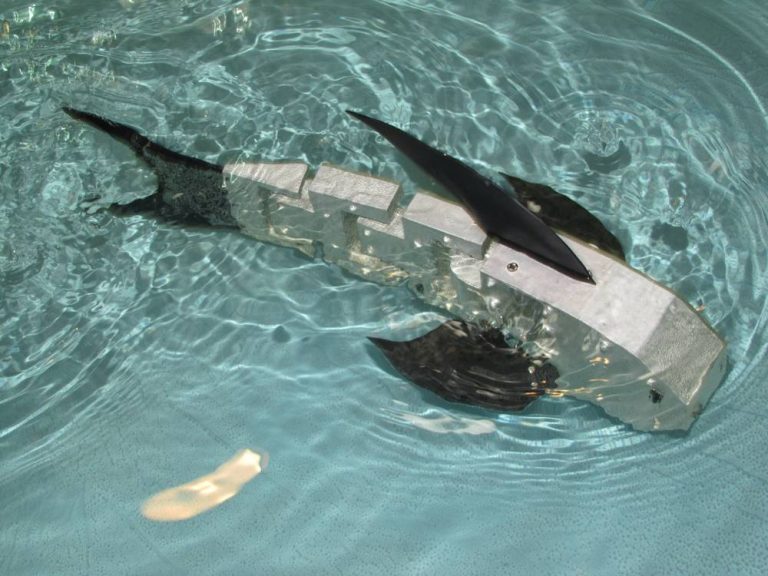
Mechanizm prostowodowy Peaucelliera-Lipkina jako napęd falowy pojazdu pływającego 1 czerwca 2023 czytaj więcej »
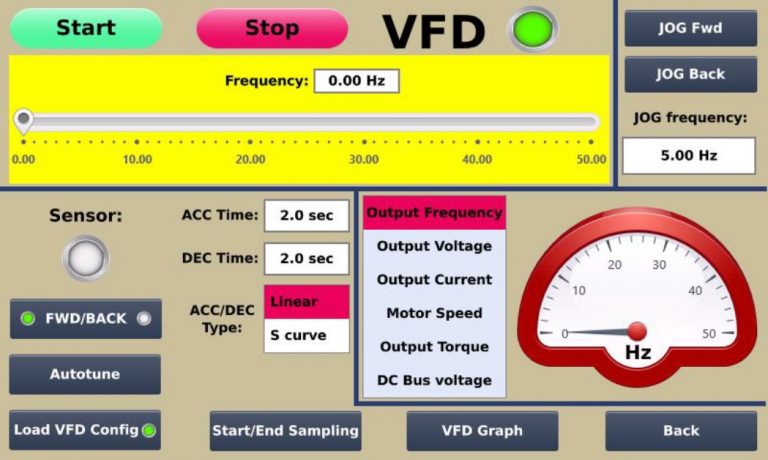
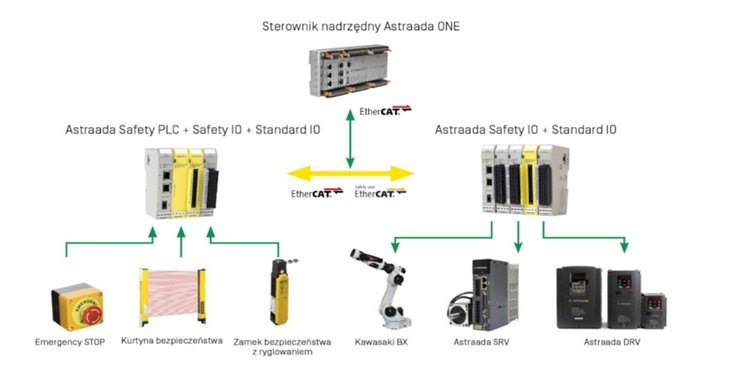
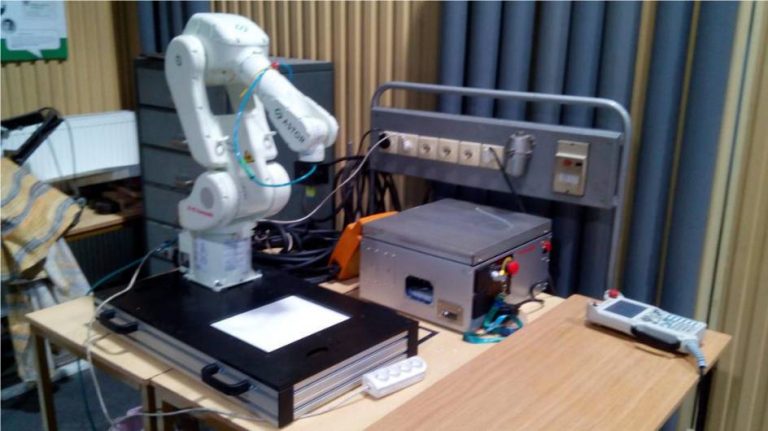
Opracowanie stanowiska dydaktyczno-przemysłowego wykorzystującego sterownik PLC, przemiennik częstotliwości oraz inne urządzenia i peryferia stosowane w automatyce 1 czerwca 2023 czytaj więcej »
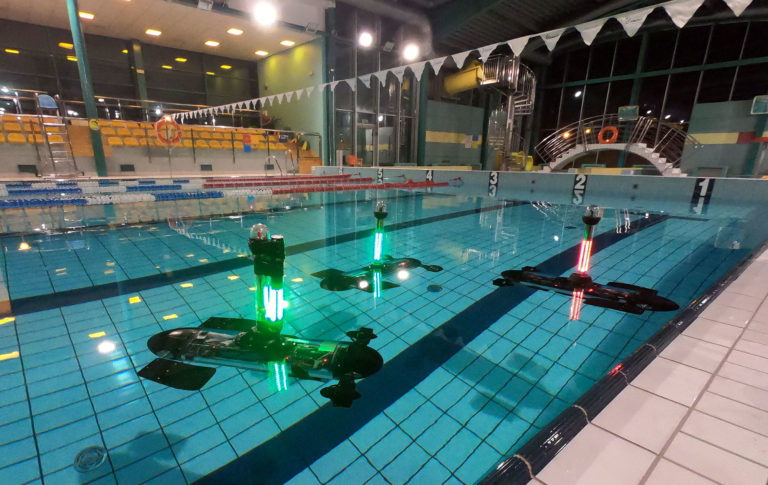
System zwiększenia zasięgu operacyjnego semi-autonomicznegopojazdu pływającego 1 czerwca 2023 czytaj więcej »
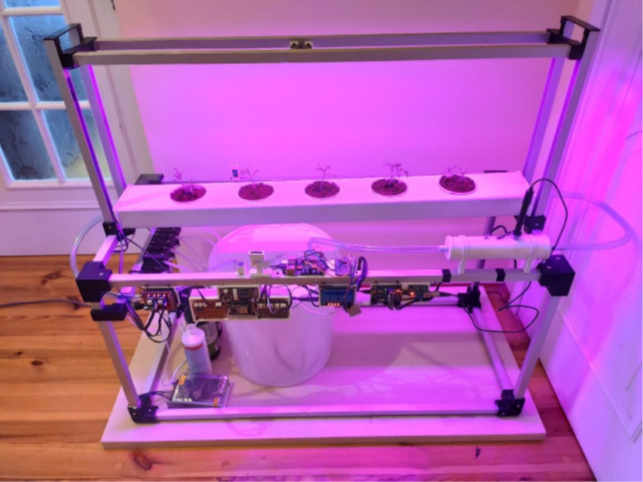
Projekt i wykonanie stanowiska testowego wraz z aplikacją do monitorowania zużycia energii elektrycznej w budynkach 31 maja 2023 czytaj więcej »
Wykorzystanie systemu DCS do wizualizacji pracy instalacji gaśniczej CFI dla zbiorników magazynowych z dachami pływającymi 31 maja 2023 czytaj więcej »
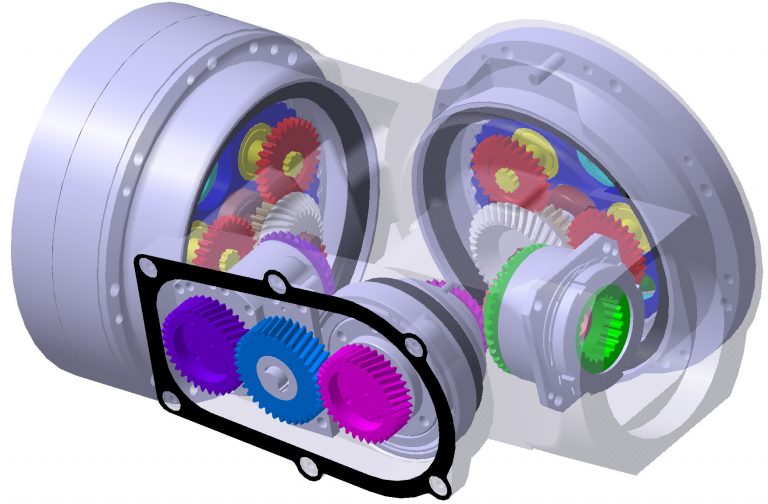
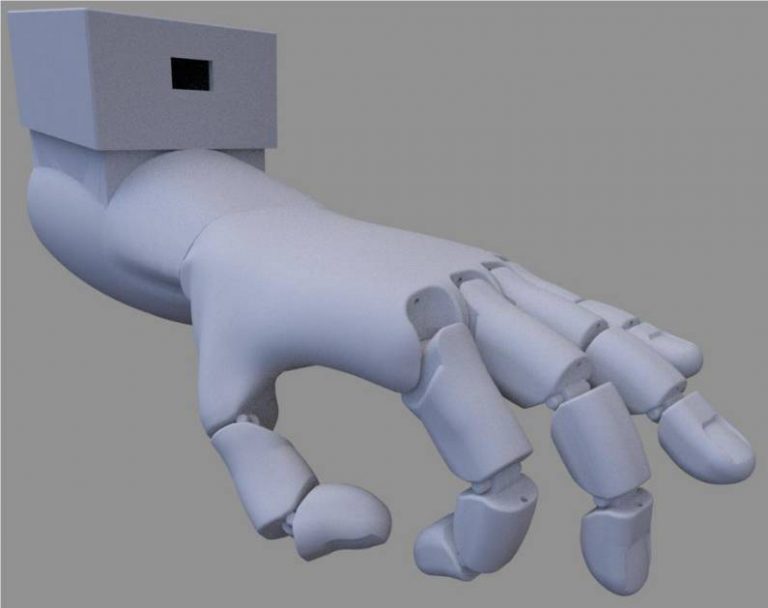
Model i analiza kinematyczna kiści robota przemysłowego Fanuc S-420F w programie CATIA V5 31 maja 2023 czytaj więcej »
Rozwiń technologiczny pomysł w plan biznesowy — i wystąp przed funduszem Venture Capital 19 kwietnia 2023 czytaj więcej »
II nagroda w konkursie Młodzi Innowacyjni 2023 dla Tomasza Talarczyka – absolwenta AiR PK 9 marca 2023 czytaj więcej »
Integracja zautomatyzowanych i zrobotyzowanych systemów wytwarzania – nowa pozycja literatury w naszej Katedrze 23 grudnia 2022 czytaj więcej »
Szkoła letnia z zakresu rozwoju, wytwarzania przyrostowego, metody elementów skończonych i zastosowań medycznych 16 lutego 2022 czytaj więcej »
Student Automatyki i Robotyki Wojciech Zelek zdobył pierwsze miejsce w konkursie 20 grudnia 2021 czytaj więcej »
BADANIE JAKOŚCI KSZTAŁCENIA PRZED I W DOBIE PANDEMII NA WYDZIALE MECHANICZNYM POLITECHNIKI KRAKOWSKIEJ 25 listopada 2021 czytaj więcej »
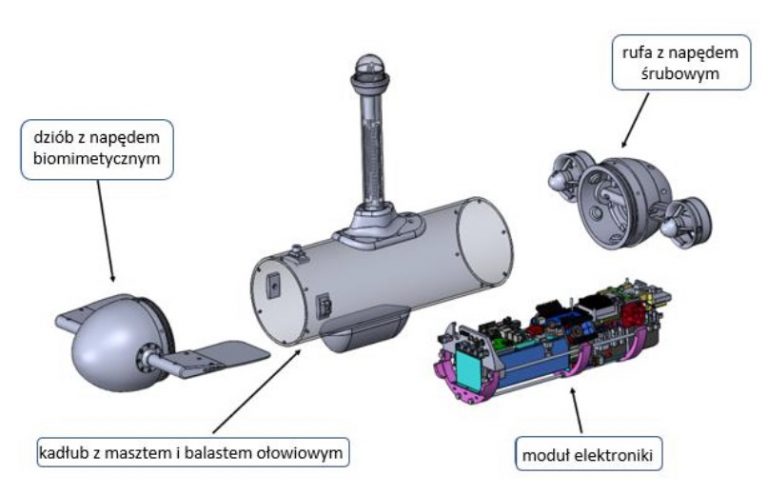
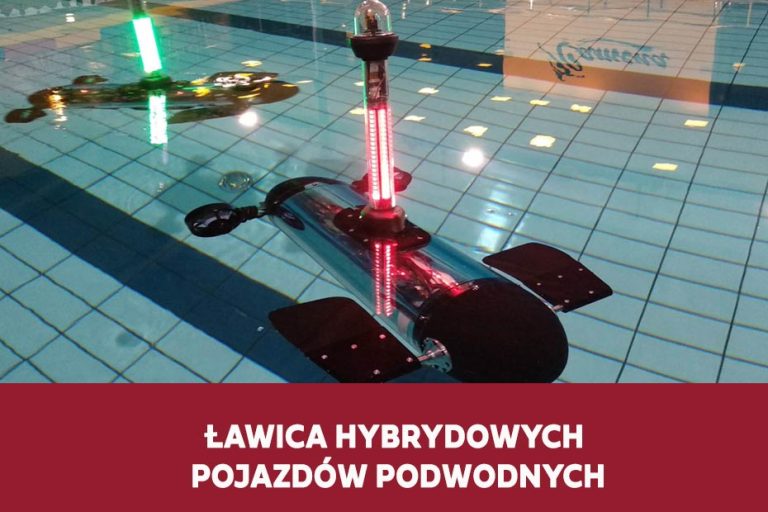
Ławice hybrydowych pojazdów podwodnych z dwutorowym systemem komunikacji 10 czerwca 2021 czytaj więcej »
Zapraszamy na wykład: „Organizacja oraz zasady pracy w komercyjnych systemach PLM” 24 maja 2021 czytaj więcej »
Politechnika Krakowska na kongresie IMPACT’18 13-14 czerwca 2018– Centrum Kongresowe ICE Kraków 18 czerwca 2018 czytaj więcej »
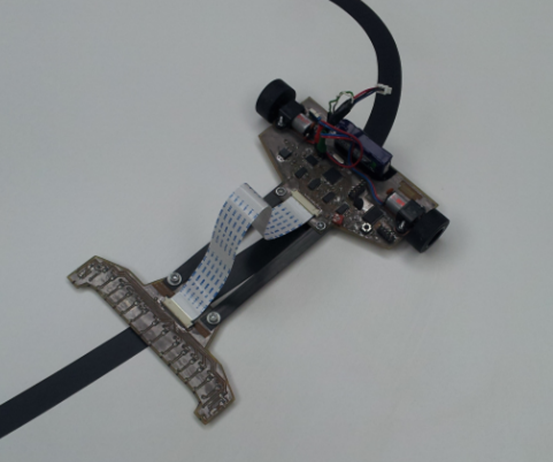
Modyfikacja projektu autonomicznego robota mobilnego do konkurencji line follower 2 czerwca 2018 czytaj więcej »
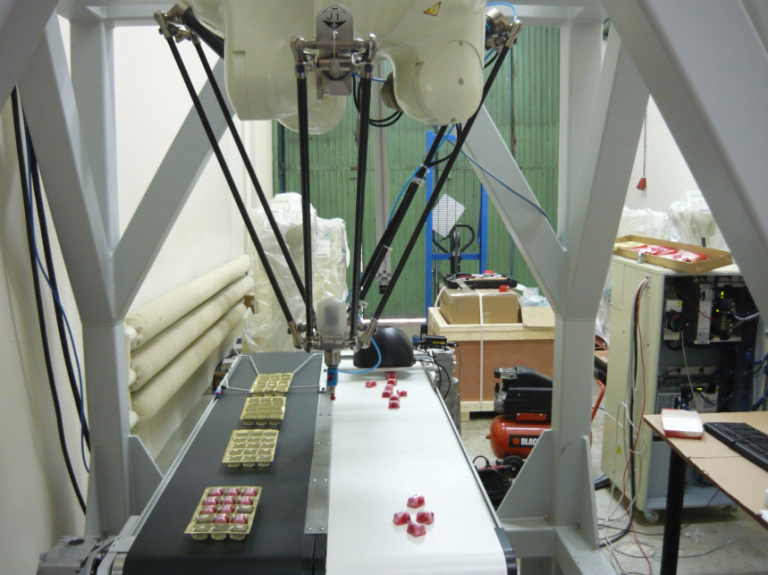
Zastosowanie robota przemysłowego Kawasaki YF003N do obsługi linii pakowania typu „Pick & Place” w firmie Ferrero Rocher 2 czerwca 2018 czytaj więcej »
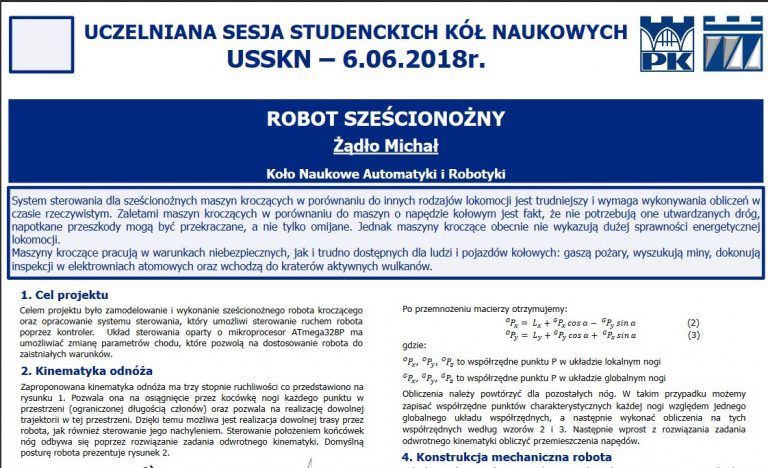
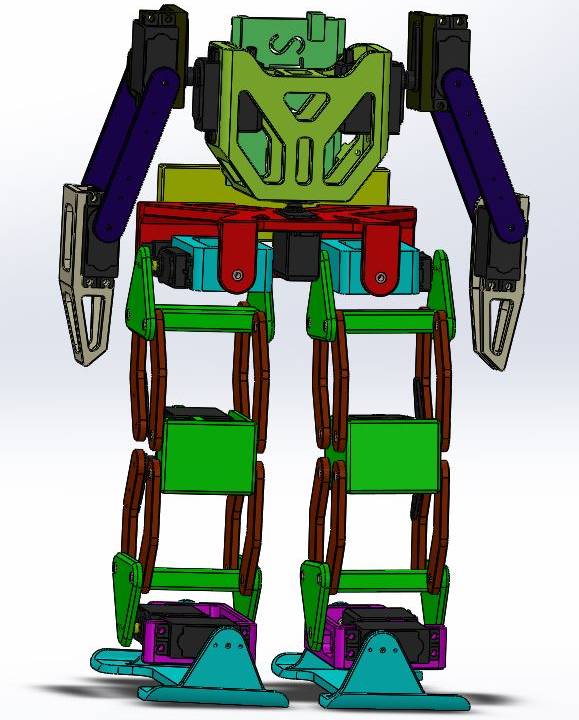
Projekt i wykonanie sześcionożnego robota kroczącego z wykorzystaniem technologii druku 3D 2 czerwca 2018 czytaj więcej »
Rozproszony, redundantny system automatyki pomieszczeń inteligentnego budynku 1 czerwca 2018 czytaj więcej »
Sensoryka i sztuczna inteligencja w budowaniu relacji pomiędzy człowiekiem a maszyną – interfejsy naturalne 1 czerwca 2018 czytaj więcej »
Integracja układu wizyjnego Sensopart Visor V10 z systemem sterowania robotem Kawasaki RS005L 1 czerwca 2018 czytaj więcej »