FESTIWAL NAUKI – RYNEK GŁÓWNY
Instytut Technologii Maszyn i Automatyzacji Produkcji bierze czynny udział w Festiwalu Nauki.
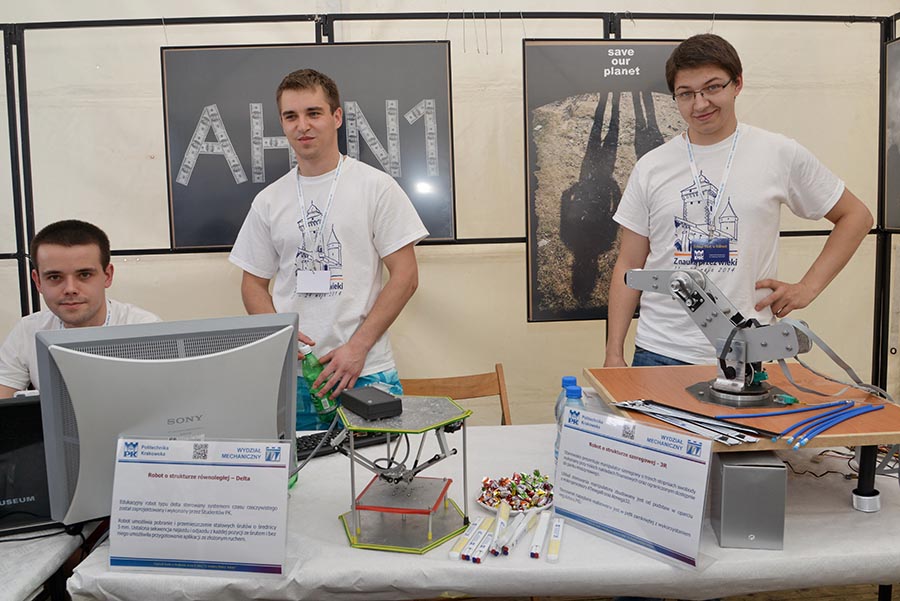
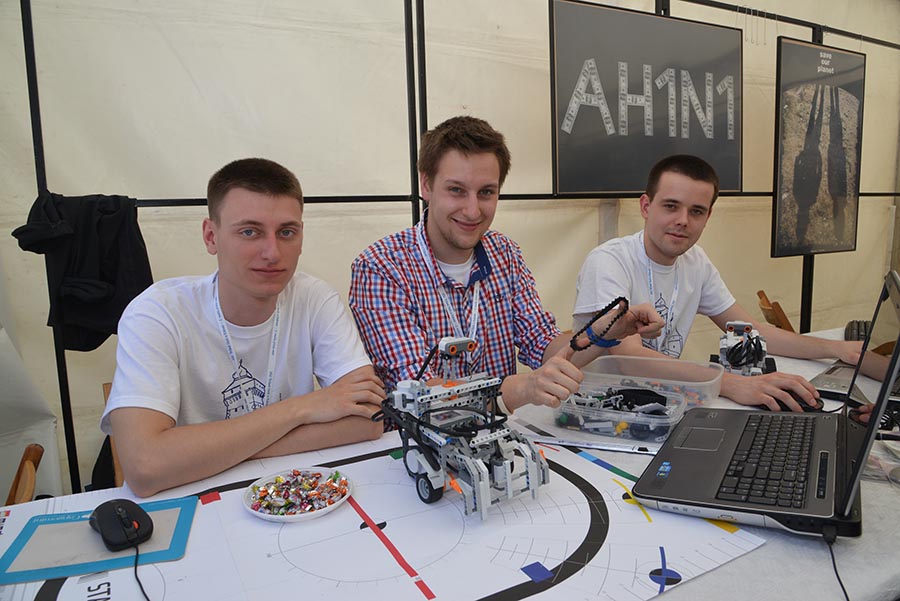
Wszyscy chętni mogą spotkać się m.in. z robotami wykonanymi przez Studentów AiR.








Przykładowe prace zaprezentowane w ostatnich latach, to:
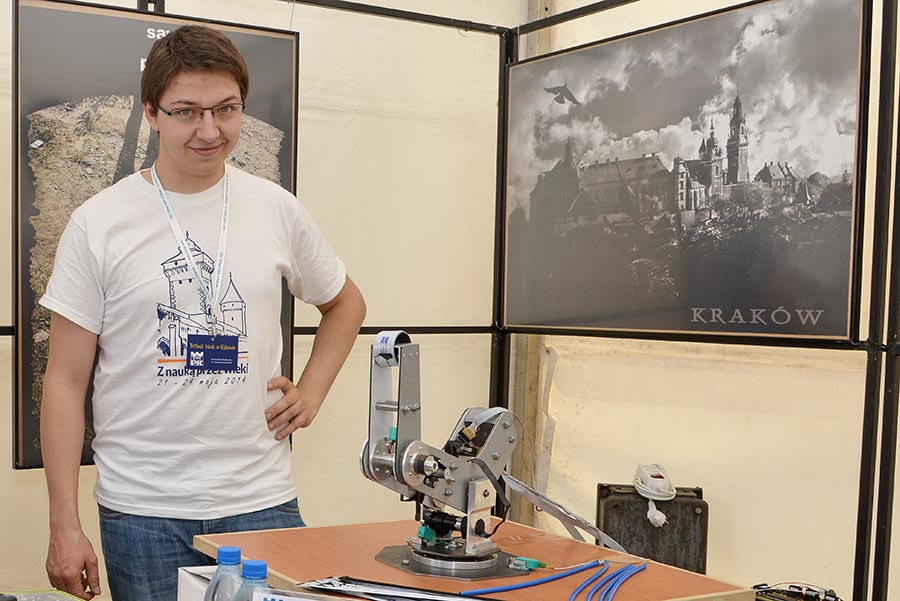
1) Robot o strukturze szeregowej – 3R
Stanowisko prezentuje manipulator szeregowy o trzech stopniach swobody wykonany przy niskich nakładach finansowych oraz ograniczonym dostępnie do parku maszynowego. Układ sterowania manipulatora zbudowany jest od podstaw
w oparciu o mikroprocesory ATmega8 oraz ATmega32. Sterownie napędami realizowane jest w pętli zamkniętej z wykorzystaniem regulatora PID.
2) Robot o strukturze równoległej – Delta
Edukacyjny robot typu delta sterowany systemem czasu rzeczywistego został zaprojektowany i wykonany przez Studentów PK. Robot umożliwia pobranie i przemieszczenie stalowych śrutów o średnicy 5 mm. Ustalona sekwencja najazdu i odjazdu z każdej pozycji ze śrutem i bez niego umożliwiła przygotowanie aplikacji ze złożonym ruchem.
3) Robot kroczący – Hexapod
Robot dzięki technice zdalnego sterowania za pomocą kontrolera i inteligentnej adaptacji, jest w stanie bezpiecznie dotrzeć tam, gdzie byłoby to niemożliwe dla człowieka. Sześć nóg umożliwia pokonanie różnych przeszkód i poruszanie się po nierównym terenie. Robot może być wykorzystany do eksploracji trudno dostępnych miejsc i badania otoczenia.
4) Robot Kawasaki rozdający słodkości
Robot przemysłowy Kawasaki RS005L w aplikacji przenoszenia i rozdawania słodyczy. Robot wyposażony w chwytak ssawkowy precyzyjnie pobiera, manipuluje i rozdaje słodycze. Zaawansowany kontroler robota dba o poprawną realizację programu, a układ bezpieczeństwa oraz czujniki zapewnia bezpieczne funkcjonowanie w pobliżu człowieka. Profesjonalny robot w ciekawej aplikacji napisanej przez Studentów w ramach stażu wykonanego w firmie Astor.
5) Gąsienicowy robot inspekcyjny R-bot
R-bot jest prototypem niewielkiego, gąsienicowego robota inspekcyjnego, który został zaprojektowany i wykonany przez Studenta PK. Robot cechuje się możliwością zmiany swoich wymiarów gabarytowych w zależności od pokonywanych przeszkód terenowych, np. w niskim tunelu lub w wąskim korytarzu.