| Autor: | Krzysztof Kieroński |
| Promotor: | dr inż. Waldemar Małopolski |
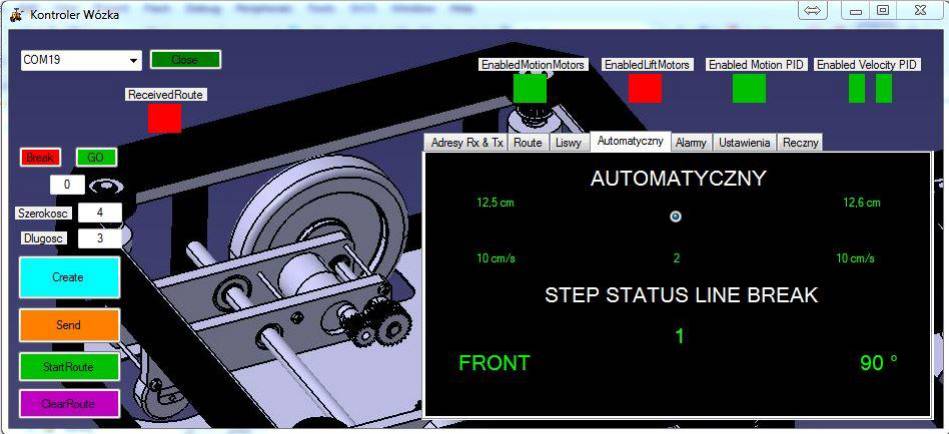
Celem pracy inżynierskiej było wykonanie i oprogramowanie sterownika mobilnego robota magazynującego typu AGV. W ramach pracy został wykonany sterownik robota wraz z oprogramowaniem kontrolującym m.in.: zadaną prędkość ruchu, pozycjonowanie w przestrzeni i realizację zadanej trasy.