| Autor: | Joanna Czyrnek |
| Promotor: | dr inż. Stanisław Krenich |
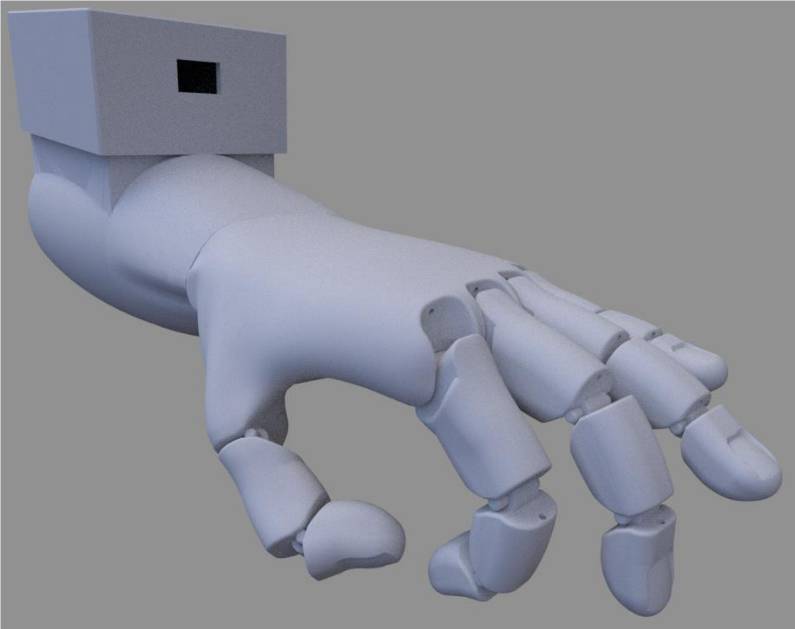
Celem niniejszej pracy było opracowanie prototypu urządzenia chwytającego wzorowanego na ludzkiej dłoni a następnie wykonanie go na drukarce 3D. Chwytak składa się z palców, które wyposażone są w tzw. paliczki połączone ruchomymi przegubami i napędzane systemem linkowym za pomocą serwomechanizmów. Układ sterowania oparty o moduły Arduino, umożliwia sterowanie położeniem paliczków i siłą ich oddziaływania na chwytany obiekt. Prototyp chwytaka został wydrukowany w technologii SLS. Metoda ta polega na drukowaniu modeli 3D z materiału sproszkowanego utwardzanego przy użyciu wiązki lasera.