| Autorzy: | mgr inż. Tomasz Talarczyk |
| Promotor: | dr inż. Marcin Malec |
Podwodny świat nie jest środowiskiem łatwym do życia i eksploracji. Na dzień dzisiejszy większą wiedzę mamy na temat kosmosu i wszechświata niż na temat mórz i oceanów, które zajmują ponad 70% powierzchni Ziemi. W przeciągu kilku ostatnich dekad rozwój techniki pozwolił na zbudowanie pierwszych bezzałogowych pojazdów podwodnych, które znacznie podniosły ten stan wiedzy. Obecnie technologia bezzałogowych pojazdów podwodnych rozwijana jest w wielu kierunkach. Dużym zainteresowaniem cieszą się systemy bezprzewodowej komunikacji, efektywne układy napędowe i zasilające oraz autonomiczne ławice pojazdów. Jedną z największych przeszkód jakie stają na drodze jest sama woda. Jej gęstość zwiększa opory ruchu, co przekłada się na niższe prędkości pływania a tłumienie fal elektromagnetycznych sprawia, że większość z obecnych systemów bezprzewodowej komunikacji opierających się na wysokich częstotliwościach przesyłania danych jest bezużyteczna. Rosnące wraz z głębokością zanurzenia ciśnienie, jest ogromnym problemem dla konstrukcji, ponieważ niezbędnym jest zapewnienie szczelności i wytrzymałości w szerokim zakresie ciśnień. Do bezobsługowej pracy pojazdów koniecznym jest opracowanie bezprzewodowych układów ładowania, tak aby umożliwić uzupełnianie energii pod powierzchnią wody
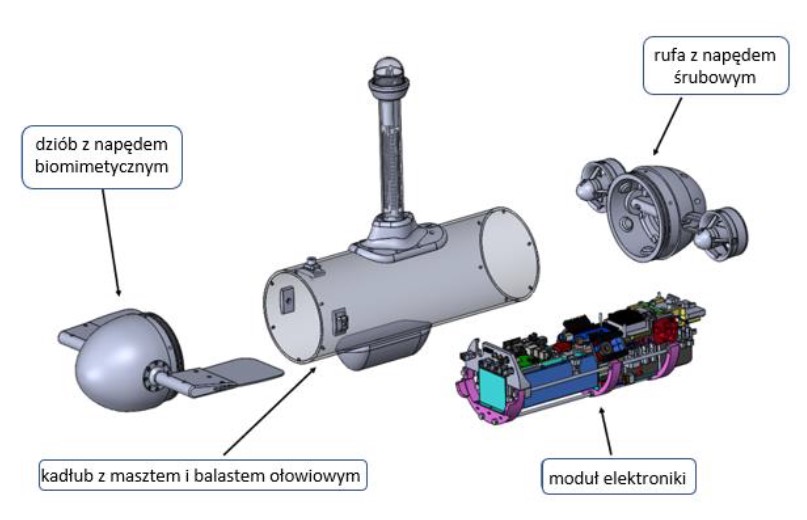
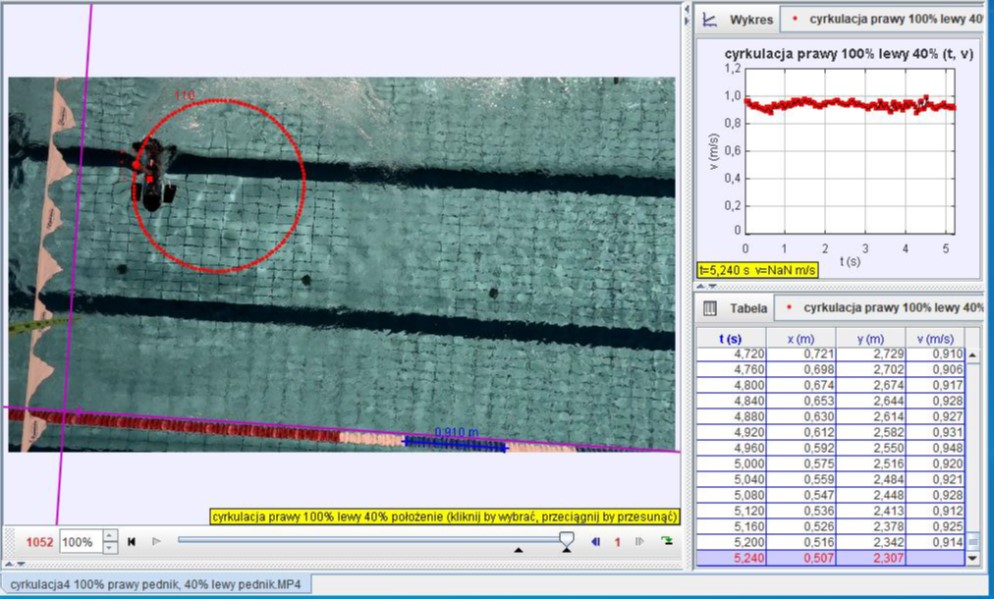
Niniejsza praca jest pierwszą z trzech prac magisterskich z projektu: „Ławica hybrydowych pojazdów podwodnych z dwu torowym systemem komunikacji”. Projekt ten powstał w wyniku współpracy trzech studentów z kierunku automatyka i robotyka. Opiekunami całego projektu byli doktorzy: Marcin Malec i Marcin Morawski. W pracy tej poruszona została tematyka projektowania w programie Solidworks oraz wykonanie pojazdu. Opisane zostały wszystkie moduły i urządzenia wykorzystane w modelu. Przybliżony zostanie również temat wydruków w technologii FDM, z których wykonane zostały główne elementy konstrukcji. W części badawczo naukowej opisane zostaną pomiary i badania różnych aspektów działania pojazdu, takich jak: parametry ruchu, regulacja zanurzenia, generowana przez napędy siła naporu.
Więcej na https://www.facebook.com/CyberRyba/