| Autorzy: | mgr inż. Marcin Sroka |
| Promotor: | dr inż. Marcin Malec |
Niniejsza praca jest drugą z trzech prac magisterskich zrealizowanych w oparciu o projekt „Ławica hybrydowych pojazdów podwodnych z dwutorowym systemem komunikacji”. Zespół trzech studentów pod przewodnictwem dr. inż. Marcina Malca i dr. inż. Marcina Morawskiego, podjął się zaprojektowania i budowy bezzałogowego pojazdu. Działania z jakimi wiązała się projekt zostały opisane w trzech pracach pod następującymi tytułami:
1. „Projekt i budowa hybrydowego pojazdu podwodnego” – autorstwa inż. Tomasza Talarczyka,
2. „Wykonanie systemu sterowania podwodnego pojazdu hybrydowego” – autorstwa inż. Marcina Sroki,
3. „Moduł do bezprzewodowego ładowania akumulatorów pojazdu podwodnego” – autorstwa inż. Krystiana Zapotocznego.
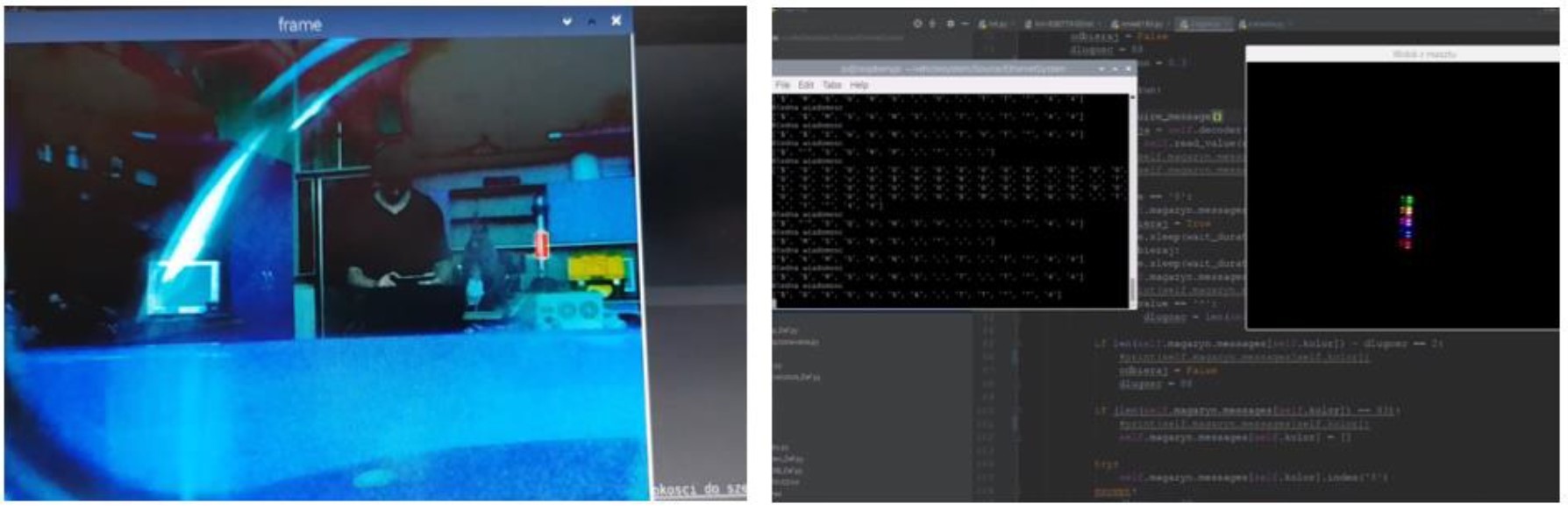
W tej pracy omówiono zagadnienia związane z oprogramowaniem systemu sterowania. Zademonstrowana została część programowa, wykorzystująca powszechnie dostępne urządzenia elektroniczne w oparciu o bezpłatne narzędzia programistyczne. Ponadto omówiono powiązanie układu sterowania pojazdu podwodnego z zaimplementowanym algorytmem rozpoznawania obrazu. Część praktyczna pracy ukazuje efekt prac wraz z przeprowadzonymi wynikami pomiarów oraz wyciągniętymi z nich wnioskami.
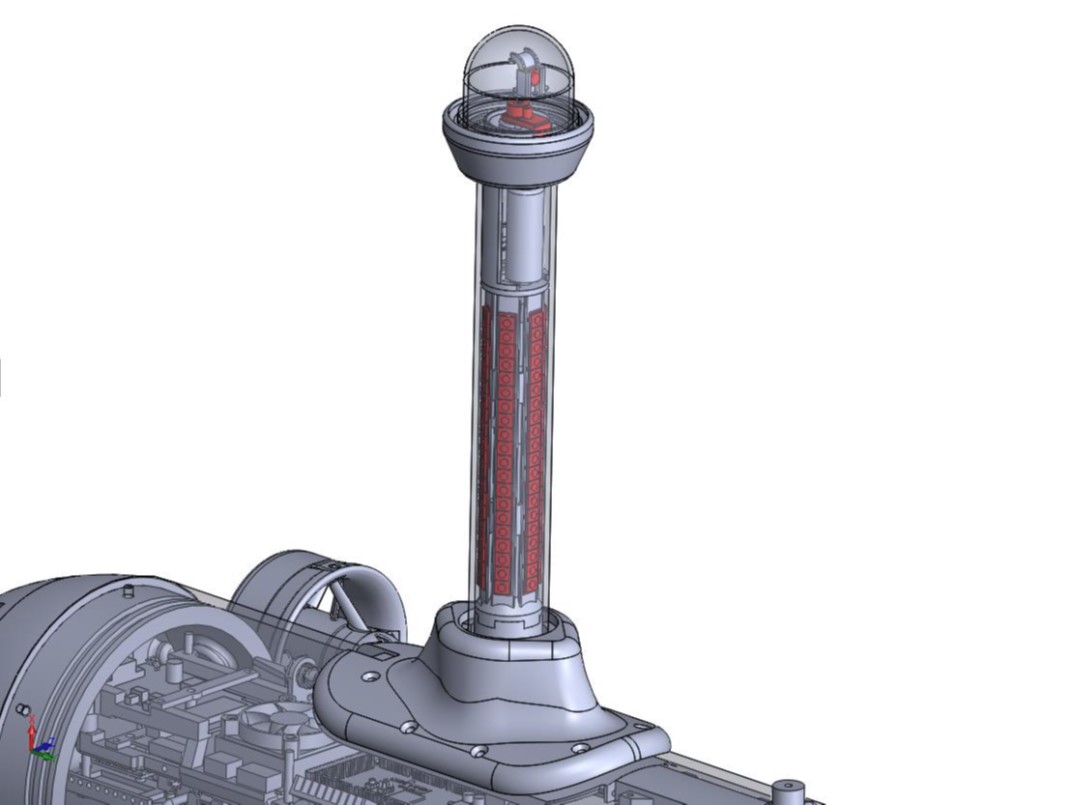
Przedstawiony został również pomysł na nowy sposób komunikacji pod wodą z wykorzystaniem pięciu barw światła widzialnego. Całość projektu została zwieńczona dwoma zgłoszeniami patentowymi złożonym na wynalazki: „Dwutorowy układ komunikacji pojazdów podwodnych” oraz „Biomimetyczny układ napędowy pojazdu pływającego”.
Więcej na https://www.facebook.com/CyberRyba/