Ciekawe prace dyplomowe
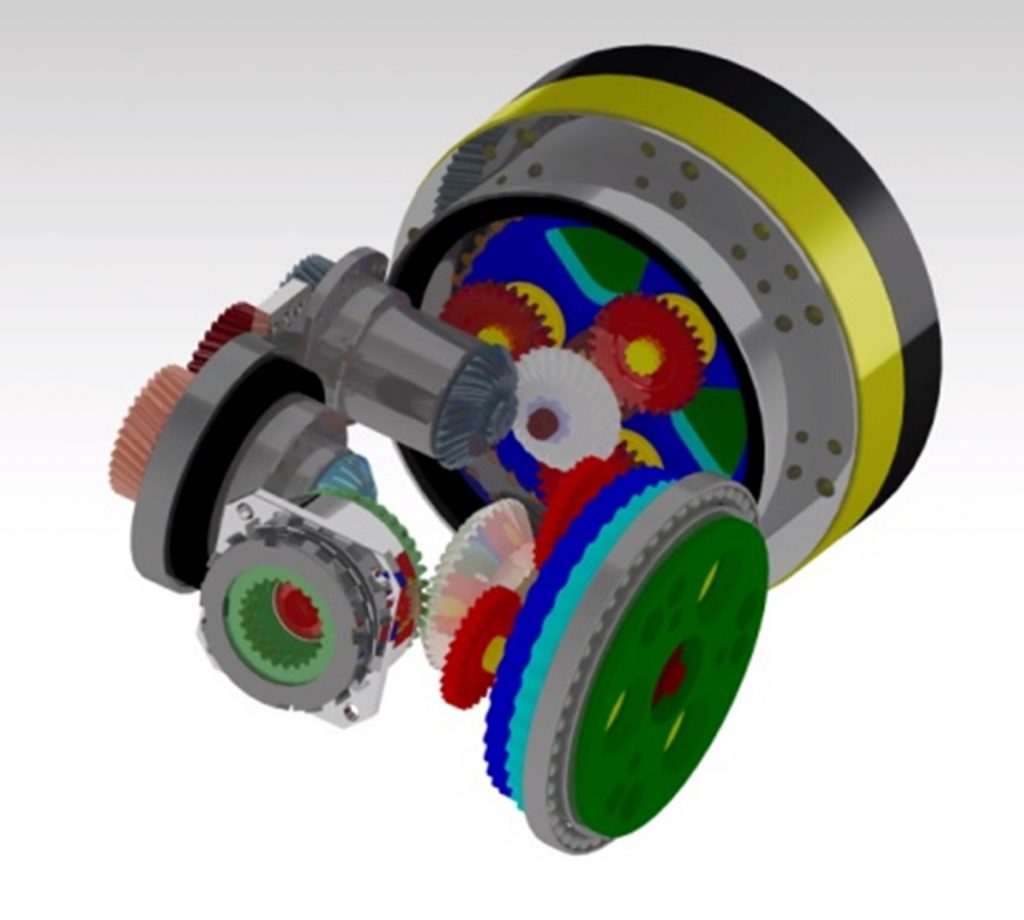
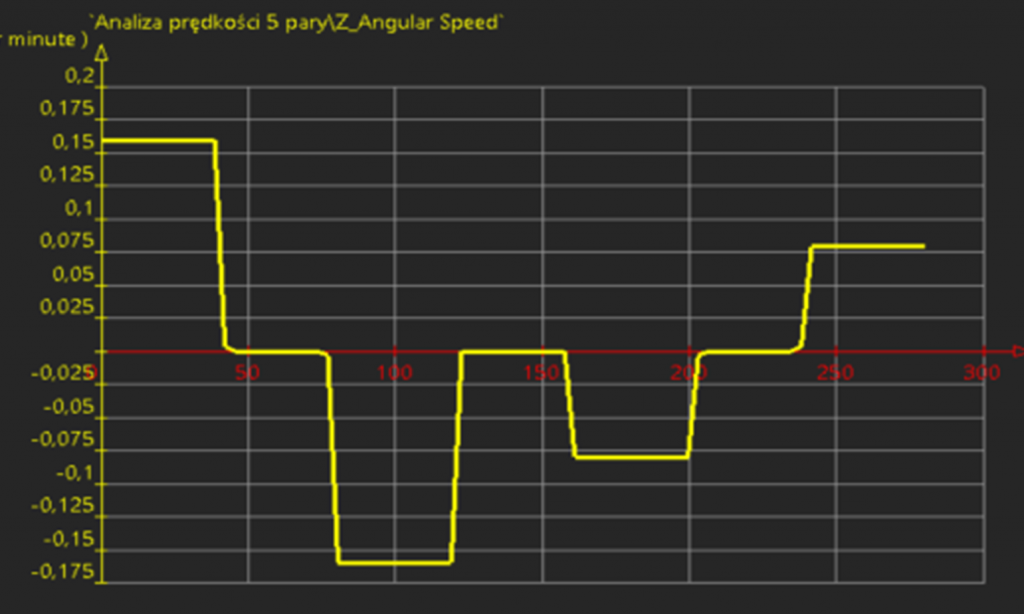
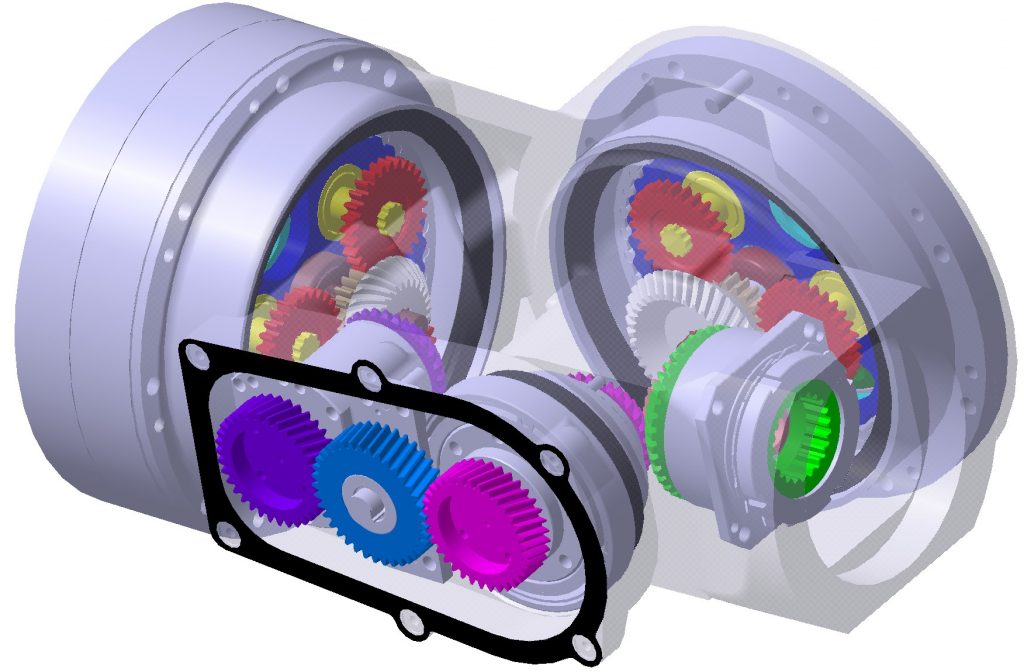
| Tytuł pracy: | Model i analiza kinematyczna kiści robota przemysłowego Fanuc S-420F w programie CATIA V5 |
| Autorzy: | inż. Jakub Bochenek |
| Promotor: | dr inż. Adam Słota, prof. PK |
| Tytuł pracy: | Projekt i wykonanie sześcionożnego robota kroczącego z wykorzystaniem technologii druku 3D |
| Autorzy: | Michał Żądło |
| Promotor: | dr inż. Stanisław Krenich |

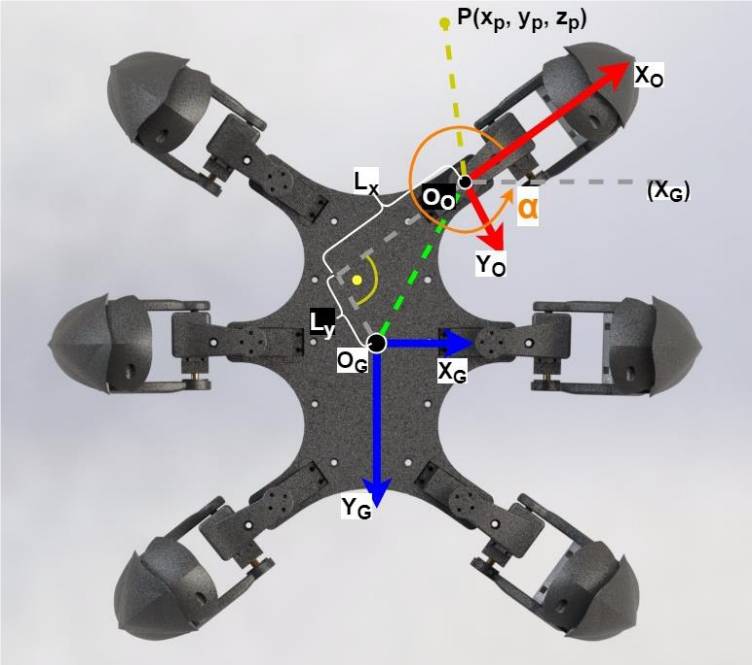
Celem projektu było opracowanie i wykonanie sześcionożnego robota kroczącego w technologii druku 3D oraz opracowanie autonomicznego mikroprocesorowego systemu sterowania wraz z modułem bezprzewodowej komunikacji Bluetooth. Układ sterowania oparty o mikrokontroler ATmega328P umożliwia zmianę parametrów chodu i jego dostosowywanie do warunków otoczenia na terenie płaskim, pochyłym oraz z przeszkodami.
Projekt zdobył Pierwsze Miejsce w Sesji Studenckich Kół Naukowych Wydziału Mechanicznego Politechniki Krakowskiej w 2018 r.
| Tytuł pracy: |
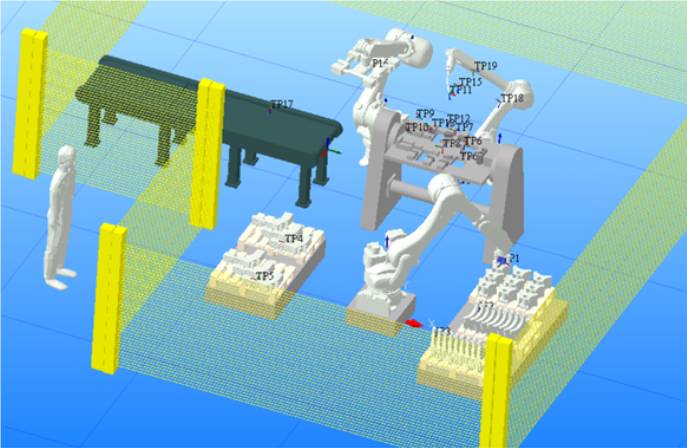
Symulacja zrobotyzowanego systemu łączenia ramy samochodu |
| Autorzy: |
Michał Kubik |
| Promotor: |
dr inż. Adam Słota |
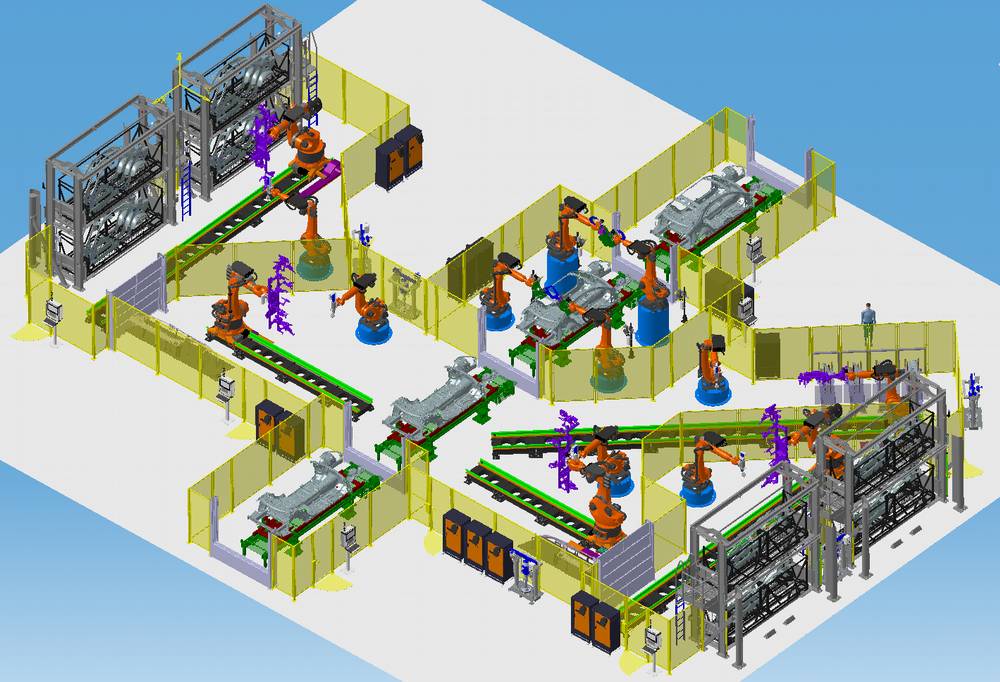
Celem pracy było zbudowanie modelu i zaprogramowanie działania zautomatyzowanego systemu montażu ramy samochodu. Autor pracy dobrał roboty przemysłowe oraz oprzyrządowanie narzędziowe i przedmiotowe, opracował strukturę procesu i zaprogramował działanie 12 robotów. Działanie systemu zostało zweryfikowane przez symulację. Na podstawie przeprowadzonej analizy wskazano możliwość skrócenia czasu cyklu. Prace zrealizowano z wykorzystaniem systemu DelmiaV5 firmy Dassault Systemes.
| Tytuł pracy: |
Robot balansujący, projekt i wykonanie |
| Autorzy: |
Paweł Gwiżdż |
| Promotor: |
dr inż. Adam Słota |
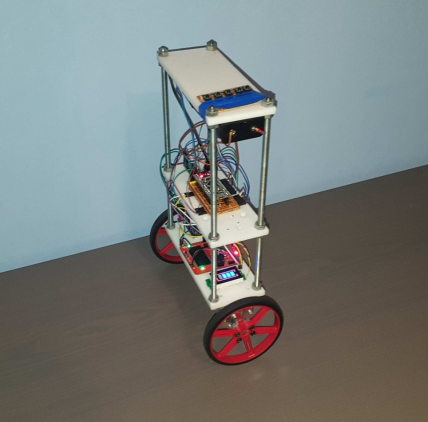
Celem pracy było zaprojektowanie oraz wykonanie mobilnego robota dwukołowego o konstrukcji wahadła odwróconego. W ramach pracy Autor dobrał komponenty układu napędowego, układu zasilania i sterowania, zaprojektował, zbudował robota i oprogramował jego układ sterowania.
| Tytuł pracy: |
Model helikoptera na uwięzi |
| Autorzy: |
Leszek Najder |
| Promotor: |
dr inż. Adam Słota |


Celem pracy była budowa stanowiska zawierającego model helikoptera na uwięzi. Sterowanie modelem odbywa się drogą radiową. Model jest przytwierdzony do uwięzi poprzez elementy wagi aerodynamicznej do pomiaru sił reakcji i jest wyposażony w podstawowe przyrządy do nawigacji: akcelerometr, żyroskop, magnetometr, barometr oraz termometr. Wyniki pomiarów są zbierane za pomocą mikrokontrolera i przesyłane do komputera PC drogą kablową z wykorzystaniem magistrali I2C.
| Tytuł pracy: |
Sensoryka i sztuczna inteligencja w budowaniu relacji pomiędzy człowiekiem a maszyną – interfejsy naturalne |
| Autorzy: |
Adam Trzmiel |
| Promotor: |
dr inż. Marta Góra |

Celem pracy było przeprowadzenie badań z zakresu nowoczesnych interfejsów komunikacji pomiędzy maszyną a człowiekiem. Uwaga autora skupiona została na interfejsach głosowych i kinematycznych stanowiących metody komunikacji bezpośredniej określane jako interfejsy naturalne. Wykorzystane zostały możliwości biblioteki Microsoft SAPI jako uniwersalnego systemu rozpoznawania i syntezy mowy niezależnego od mówcy. Wykorzystanie sensora 3D Microsoft Kinect pozwoliło na przeprowadzenie detekcji ruchu i gestów w środowisku trójwymiarowym, polepszając tym samym skuteczność detekcji obrazu i stwarzając nowe możliwości interpretacji ruchu. W ramach pracy zaimplementowane zostały z powodzeniem rozwiązania realizujące zadanie sterowania i nadzorowania stanu systemu komputerowego oraz zrobotyzowanej platformy mobilnej na przykładzie sześcionożnego robota kroczącego, jak również pozwalające na pomiary dokładności i skuteczności funkcjonowania badanych interfejsów.
| Film |
| Tytuł pracy: |
CyberRyba – podwodny robot mobilny |
| Autorzy: |
Marcin Malec, Marcin Morawski, Dominik Wojtas |
| Promotor: |
dr hab. inż. Jerzy Zając, Prof. PK |
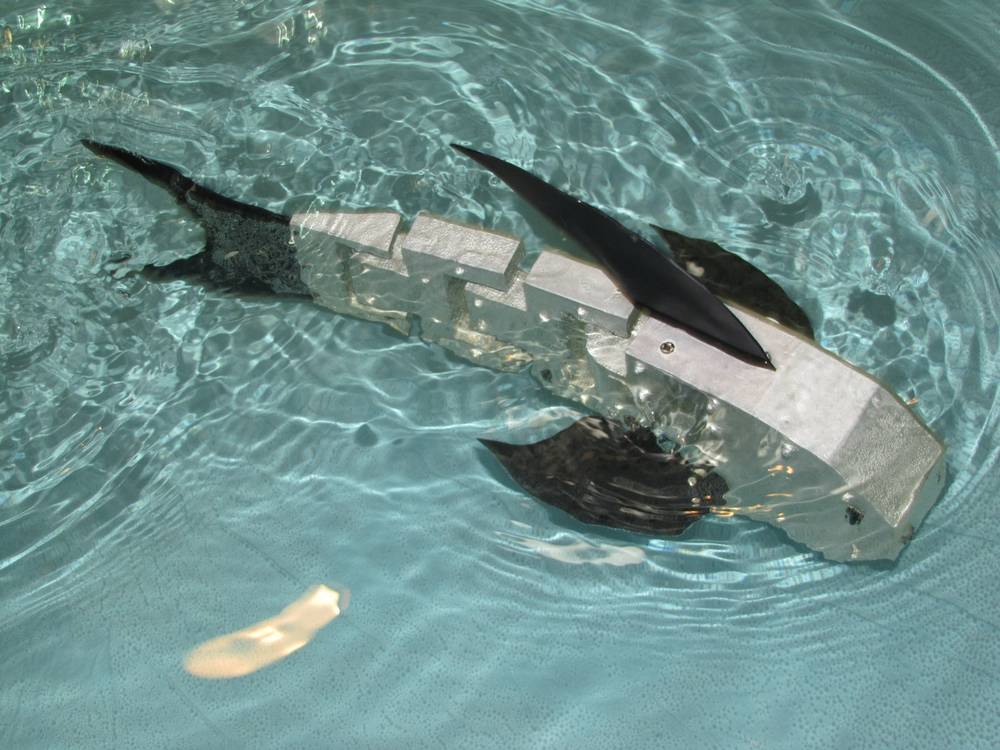
Głównym celem pracy było stworzenie koncepcji, zaprojektowanie konstrukcji i wykonanie podwodnego robota mobilnego, naśladującego rybę sposobem poruszania się oraz napisanie aplikacji sterujących robotem. Robota wyposażono w cyfrowy czujnik temperatury, ultradźwiękowe czujniki wykrywania obiektów, bezprzewodową kamerę oraz bezprzewodowy układ komunikacji z komputerem PC.
CyberRyba bierze pierwszą nagrodę w II Ogólnopolskim konkursie na najlepszą pracę dyplomową w dziedzinach automatyki, robotyki i pomiarów.
| Więcej informacji: http://cyberryba.pl https://www.facebook.com/CyberRyba/ |
| Tytuł pracy: |
Projekt i wykonanie mini-robota humanoidalnego |
| Autorzy: |
Andrzej Iwański |
| Promotor: |
dr inż. Stanisław Krenich |
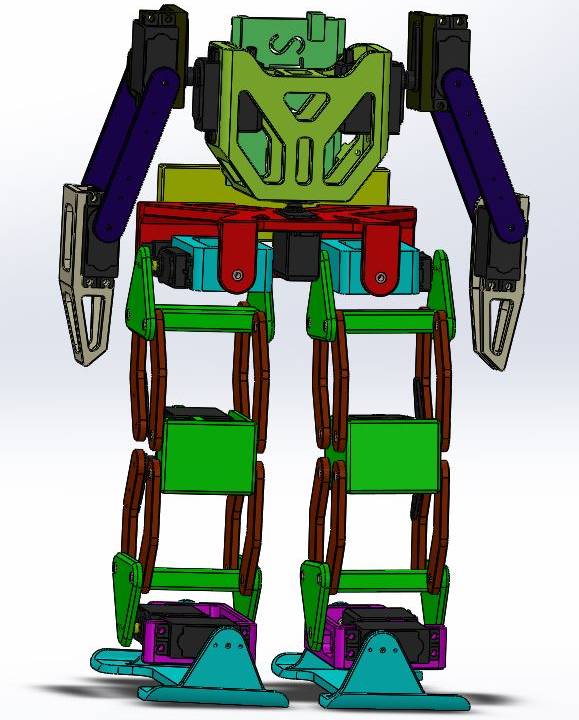
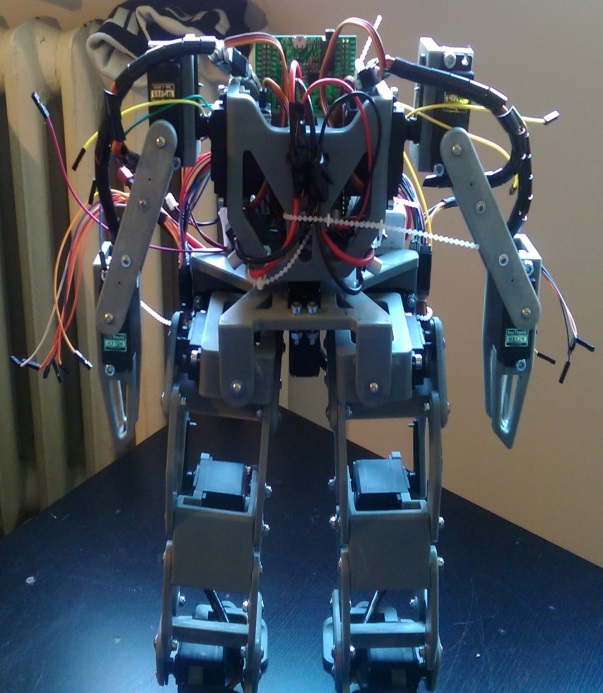
Celem pracy było zaprojektowanie a następnie zbudowanie robota humanoidalnego posiadającego ruchliwość kończyn zbliżoną do ruchliwości człowieka i wyposażonego w mikrokomputerowy układ sterowania umożliwiający autonomiczne poruszanie się. Do opracowania robota wykorzystano oprogramowanie SolidWorks, a elementy mechaniczne wykonano metodą druku 3D. Algorytm sterowania umożliwiał realizację różnych możliwości chodu oraz wstawania z podłoża.
| Tytuł pracy: |
Projekt i wykonanie prototypu sztucznej dłoni w technologii druku 3D |
| Autorzy: |
Joanna Czyrnek |
| Promotor: |
dr inż. Stanisław Krenich |
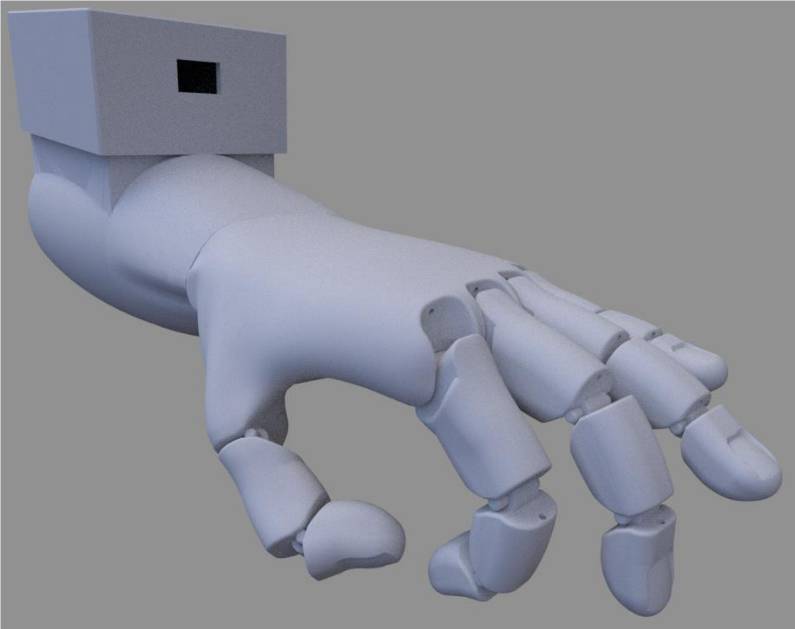

Celem niniejszej pracy było opracowanie prototypu urządzenia chwytającego wzorowanego na ludzkiej dłoni a następnie wykonanie go na drukarce 3D. Chwytak składa się z palców, które wyposażone są w tzw. paliczki połączone ruchomymi przegubami i napędzane systemem linkowym za pomocą serwomechanizmów. Układ sterowania oparty o moduły Arduino, umożliwia sterowanie położeniem paliczków i siłą ich oddziaływania na chwytany obiekt. Prototyp chwytaka został wydrukowany w technologii SLS. Metoda ta polega na drukowaniu modeli 3D z materiału sproszkowanego utwardzanego przy użyciu wiązki lasera.
| Tytuł pracy: |
Integracja układu wizyjnego Sensopart Visor V10 z systemem sterowania robotem Kawasaki RS005L |
| Autorzy: |
Mateusz Augustyn |
| Promotor: |
dr inż. Stanisław Krenich |


Celem pracy było zintegrowanie układu sterowania robota Kawasaki RS005L z kamerą Sensopart Visor V10 oraz opracowanie algorytmu sterowania dla zadania określenia współrzędnych obiektów poprzez analizę ich konturów z użyciem systemu wizyjnego i wykonaniu ruchu robota na podstawie danych pochodzących z inteligentnej kamery. Celem dodatkowym było przeprowadzenie badania wpływu natężenia światła na pracę systemu wizyjnego. W wyniku przeprowadzonego badania otrzymano zalecany zakres wartości natężenia światła.
| Tytuł pracy: |
Modelowanie i symulacja zrobotyzowanego stanowiska spawania ram motocyklowych z wykorzystaniem aplikacji K-Roset |
| Autorzy: |
Szymon Baklarz |
| Promotor: |
dr inż. Stanisław Krenich |
Celem pracy było stworzenie wirtualnego zrobotyzowanego gniazda do spawania ram motocyklowych wzorowanego na rzeczywistym stanowisku i umożliwiającego symulację, optymalizację, przygotowywanie oprogramowania dla robotów Kawasaki oraz szkolenie obsługi. Podczas budowy wirtualnego gniazda wykorzystano biblioteki oprogramowania K-Roset oraz elementy systemu produkcyjnego zaprojektowane w zewnętrznych aplikacjach CAD.
| Tytuł pracy: |
Projekt i budowa prototypu robota mobilnego z napędem dwukołowym |
| Autorzy: |
Aleksander Kukla |
| Promotor: |
dr inż. Waldemar Małopolski |
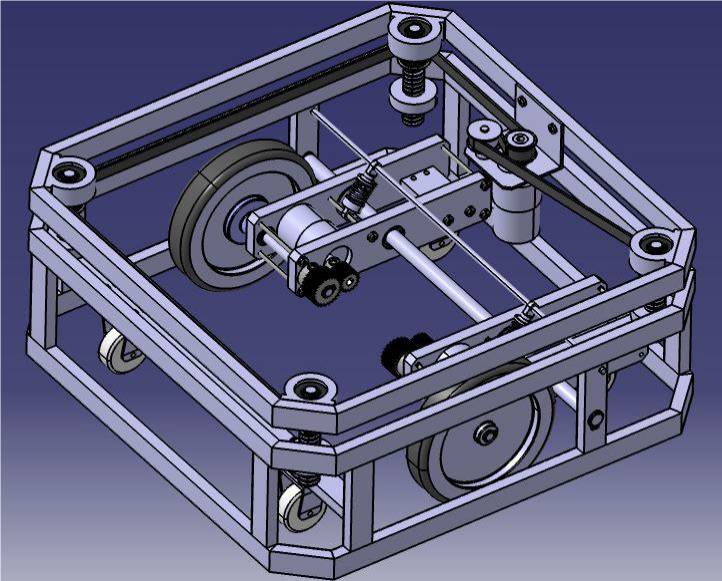
Celem pracy inżynierskiej było zaprojektowanie i wykonanie prototypu układu mechanicznego robota mobilnego z napędem dwukołowym. Robot jest przeznaczony do realizacji czynności magazynujących.
| Tytuł pracy: |
Oprogramowanie dwukołowego mobilnego robota magazynującego |
| Autorzy: |
Krzysztof Kieroński |
| Promotor: |
dr inż. Waldemar Małopolski |
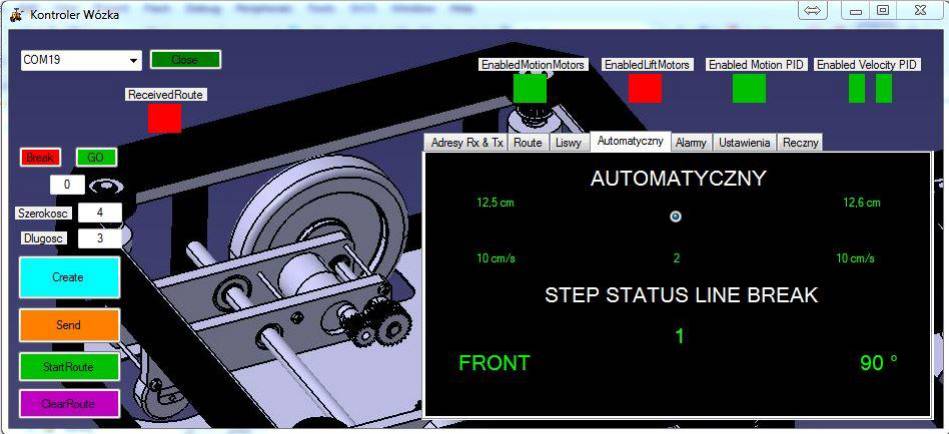
Celem pracy inżynierskiej było wykonanie i oprogramowanie sterownika mobilnego robota magazynującego typu AGV. W ramach pracy został wykonany sterownik robota wraz z oprogramowaniem kontrolującym m.in.: zadaną prędkość ruchu, pozycjonowanie w przestrzeni i realizację zadanej trasy.
| Tytuł pracy: |
Projekt i wykonanie frezarki CNC do obróbki drewna |
| Autorzy: |
Kwak Bartosz |
| Promotor: |
dr inż. Waldemar Małopolski |

Celem pracy dyplomowej inżynierskiej było zaprojektowanie i wykonanie prototypu mini frezarki CNC do obróbki drewna. Realizacja pracy obejmowała: przyjęcie założeń konstrukcyjnych, projekt konstrukcji mechanicznej, montaż, uruchomienie i testy.
| Tytuł pracy: |
Modernizacja napędów i układu sterowania tokarki dydaktycznej emco |
| Autorzy: |
Kaczorowski Piotr |
| Promotor: |
dr inż. Waldemar Małopolski |
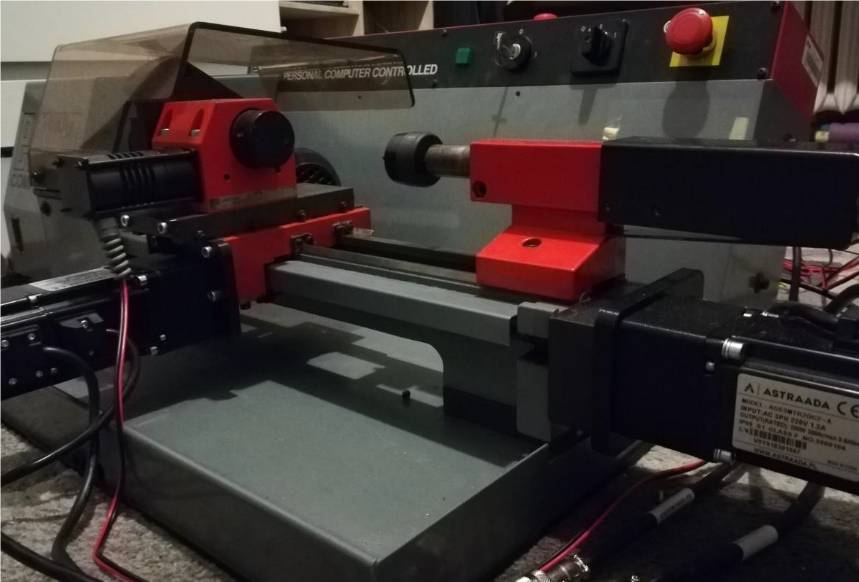
Celem pracy była modernizacja mechaniczna, budowa i oprogramowanie układu sterowania tokarki dydaktycznej EMCO Compact PC5 . Zmodernizowana tokarka będzie służyć jako pomoc dydaktyczna na zajęciach z metod obróbki ubytkowej i programowania obrabiarek sterowanych numerycznie.
| Tytuł pracy: |
Projekt i budowa frezarki sterowanej numerycznie |
| Autorzy: |
Woźniak Ryszard |
| Promotor: |
dr inż. Waldemar Małopolski |
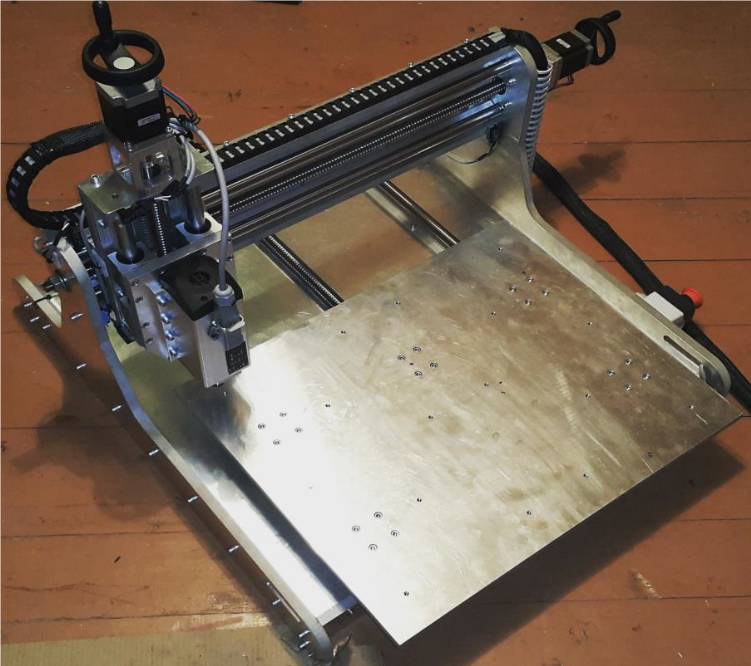
Celem pracy był projekt i budowa frezarki sterowanej komputerowo, która umożliwi obróbkę detali wykonanych z drewna oraz metali miękkich. Praca zawiera dokładny opis etapów powstawania projektu, zarówno od strony przygotowania teoretycznego oraz budowy, po uruchomienie i obróbkę.
| Tytuł pracy: |
Zastosowanie robota przemysłowego Kawasaki YF003N do obsługi linii pakowania typu „Pick & Place” w firmie Ferrero Rocher |
| Autorzy: |
Dariusz Biega |
| Promotor: |
dr hab. inż. Jerzy Zając, prof. PK |
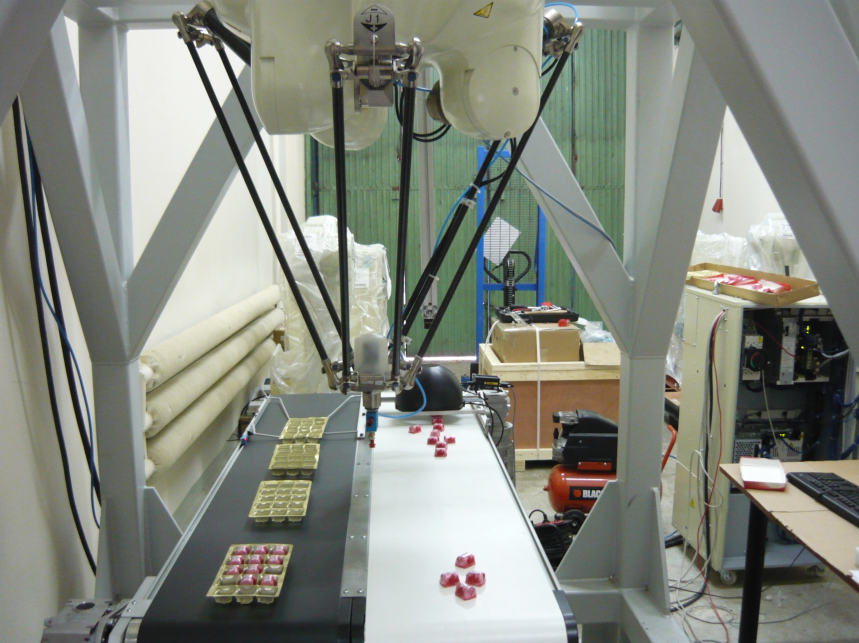
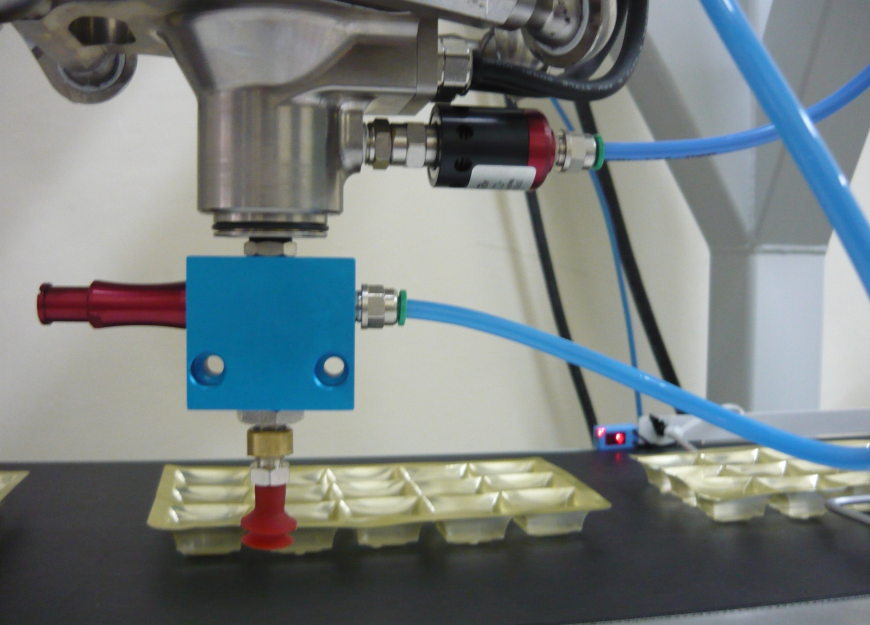
Zasadniczym celem pracy jest przeanalizowanie wydajności i zysków wynikających z wykorzystania zrobotyzowanej obsługi linii typu Pick & Place w przemyśle spożywczym w fabryce FERRERO ROCHER. Została zaprojektowana i wykonana aplikacja pilotażowa z wykorzystaniem robota Kawasaki YF003N i systemu wizyjnego, która ma na celu wykazanie zasadności zastosowania robota do pakowania czekoladek w blistrach. Proces polega na automatycznym pakowaniu małych czekoladek do pustych blistrów bombonierek transportowanych na przenośnikach taśmowych. Na etapie projektowania wzięto pod uwagę różne koncepcje budowy stanowiska. Przeprowadzona analiza ekonomiczna pozwoliła na uzyskanie odpowiedzi na pytanie „czy, a jeżeli tak, to przy jakich parametrach zastosowanie zrobotyzowanej linii obsługi pakowania typu Pick & Place w przemyśle spożywczym jest uzasadnione”?
| Tytuł pracy: |
Modyfikacja projektu autonomicznego robota mobilnego do konkurencji line follower |
| Autorzy: |
Dominik Ciślak |
| Promotor: |
dr hab. inż. Jerzy Zając, prof. PK |
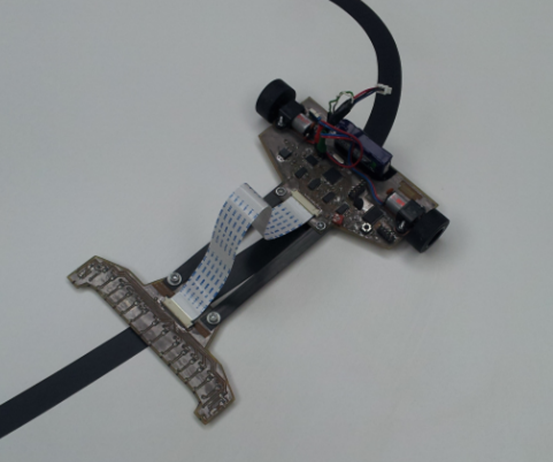
Celem pracy magisterskiej było przeprojektowanie oraz gruntowna przebudowa robota mobilnego do konkurencji Line Follower powstałego na potrzeby pracy inżynierskiej autora oraz opracowanie dedykowanej aplikacji na platformę Android służącej do sterowania konstrukcją. Wykorzystując doświadczenia zdobyte przy budowie poprzedniej wersji konstrukcji oraz obserwacje pomysłów konstruktorskich czołowych polskich zawodników konkurencji Line Follower, ustalono następujące wymagania, które wykorzystano przy budowie nowej wersji robota:
• kształt listwy z czujnikami odbiciowymi powinien przypominać łuk – dla lepszego wykrywania zakrętów pod kątem prostym
• liczba czujników powinna być możliwie wysoka – dla zapewnienia jak najlepszej rozdzielczości odczytu
• zastosowanie gotowych modułów mikroprocesorowych pomoże uniknąć mikro zwarć oraz częstych niedomagań elektronicznych
• o komunikacji najlepiej zastosować technologie pozwalające na szybką i sprawdzoną komunikację dwustronną (WIFI, Bluetooth, LTE)
• korzystanie z szeroko opisanych technik optymalizacji oprogramowania pozwoli na efektywne wykorzystanie zasobów sprzętowych oraz ograniczenie wycieków pamięci czy zbyt długo działających pętli
• zastosowanie mechanizmów samo strojenia powinno ułatwić operatorowi robota start w zawodach.
| Tytuł pracy: |
Rozproszony, redundantny system automatyki pomieszczeń inteligentnego budynku |
| Autorzy: |
Paweł Skowron, Paweł Święch |
| Promotor: |
dr hab. inż. Jerzy Zając, prof. PK |

Zasadniczym celem pracy było zaprojektowanie rozproszonego systemu automatyki pomieszczeń inteligentnego budynku spełniającego podstawowe założenia dotyczące łatwości adaptacji systemu do różnego wyposażenia pomieszczeń i zapewnienie niezawodności pod względem komunikacji pomiędzy poszczególnymi jego elementami oraz wykonanie tablicy demonstracyjnej. Zbudowany system, za sprawą swojej modułowej budowy, umożliwia dobranie komponentów odpowiednich do sterowania oraz obsługi urządzeń znajdujących się w różnie wyposażonych pomieszczeniach. Pozwala on także na łatwą rozbudowę o kolejne funkcjonalności oraz rekonfigurację w trakcie pracy. Dzięki zastosowaniu redundantnej struktury połączeń pomiędzy poszczególnymi elementami systemu, udało się także zwiększyć jego niezawodność.
| Tytuł pracy: |
Badanie możliwości zastosowania urządzenia Emotiv Epoc+ do sterowania pracą robota przemysłowego |
| Autorzy: |
Tomasz Dutka |
| Promotor: |
dr hab. inż. Jerzy Zając, prof. PK |
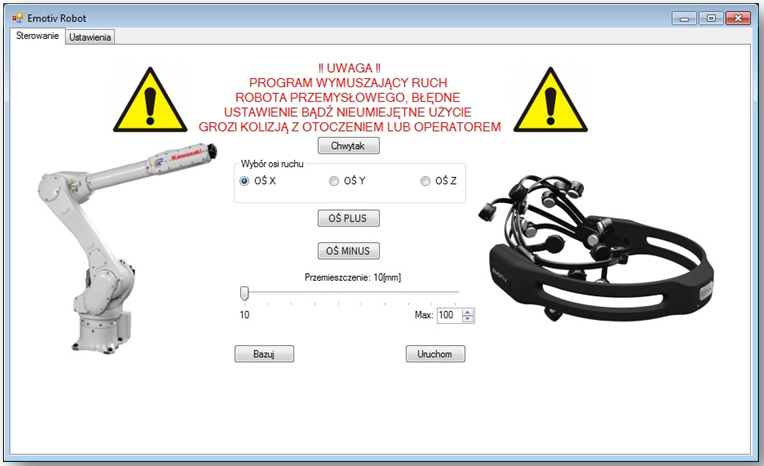
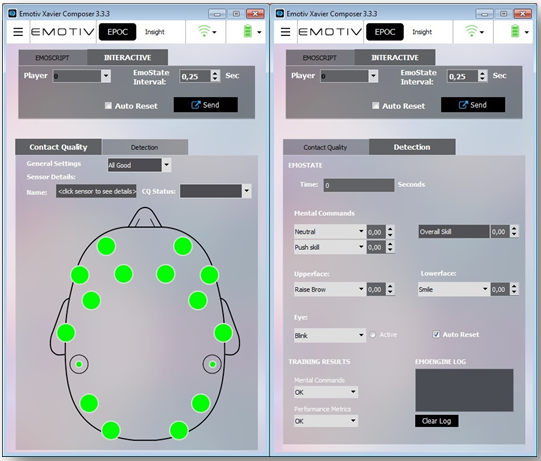
Zasadniczym celem pracy było zbadanie czy możliwe jest sterowanie prostymi ruchami robota przemysłowego za pomocą poleceń myślowych wydawanych przez operatora. Dla realizacji tego zadnia opracowano system złożony z urządzenia Emotiv Epoc+ odpowiedzialnego za akwizycję danych EEG, które zintegrowano z opracowanym oprogramowaniem umożliwiającym przetwarzanie pozyskanych informacji na polecenia dla robota przemysłowego realizującego proste zadania manipulacyjne. Opracowany system zdalnego sterowania robotem za pomocą myśli umożliwia poruszanie chwytakiem w trzech osiach kartezjańskiego układu współrzędnych. Należy zaznaczyć, że prawidłowe rozpoznawanie komend myślowych operatora umożliwiających sterowanie pracą robota wymaga wcześniejszego treningu z wykorzystaniem oprogramowaniu Emotiv.