| Autorzy: | Andrzej Iwański |
| Promotor: | dr inż. Stanisław Krenich |
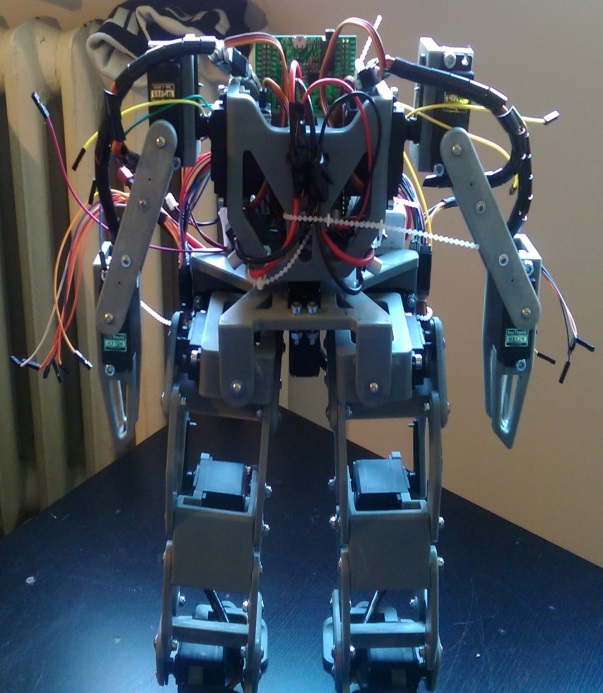
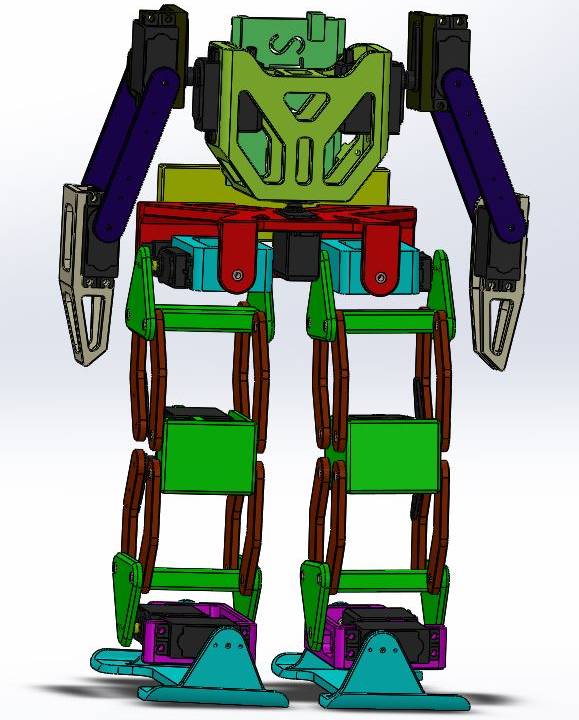
Celem pracy było zaprojektowanie a następnie zbudowanie robota humanoidalnego posiadającego ruchliwość kończyn zbliżoną do ruchliwości człowieka i wyposażonego w mikrokomputerowy układ sterowania umożliwiający autonomiczne poruszanie się. Do opracowania robota wykorzystano oprogramowanie SolidWorks, a elementy mechaniczne wykonano metodą druku 3D. Algorytm sterowania umożliwiał realizację różnych możliwości chodu oraz wstawania z podłoża.