| Autor: | Michał Kubik |
| Promotor: | dr inż. Adam Słota |
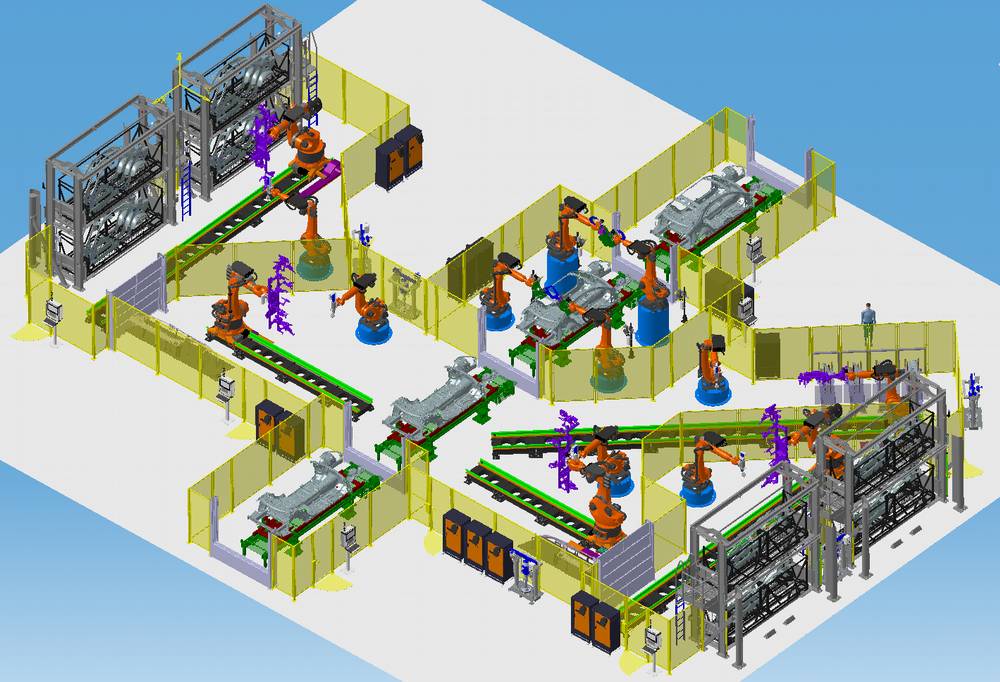
Celem pracy było zbudowanie modelu i zaprogramowanie działania zautomatyzowanego systemu montażu ramy samochodu. Autor pracy dobrał roboty przemysłowe oraz oprzyrządowanie narzędziowe i przedmiotowe, opracował strukturę procesu i zaprogramował działanie 12 robotów. Działanie systemu zostało zweryfikowane przez symulację. Na podstawie przeprowadzonej analizy wskazano możliwość skrócenia czasu cyklu. Prace zrealizowano z wykorzystaniem systemu DelmiaV5 firmy Dassault Systemes.