| Autorzy: | Szymon Baklarz |
| Promotor: | dr inż. Stanisław Krenich |
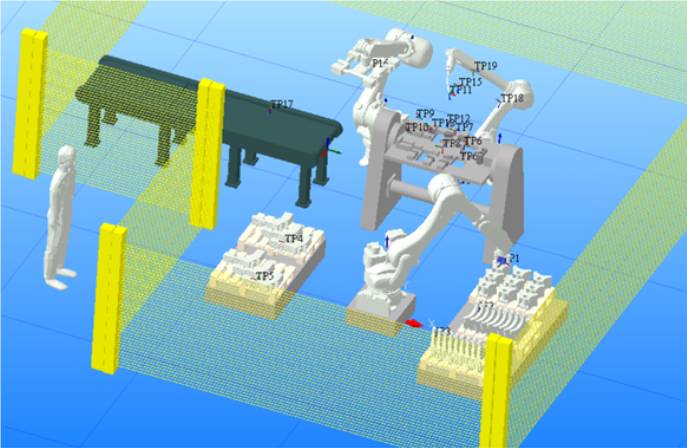
Celem pracy było stworzenie wirtualnego zrobotyzowanego gniazda do spawania ram motocyklowych wzorowanego na rzeczywistym stanowisku i umożliwiającego symulację, optymalizację, przygotowywanie oprogramowania dla robotów Kawasaki oraz szkolenie obsługi. Podczas budowy wirtualnego gniazda wykorzystano biblioteki oprogramowania K-Roset oraz elementy systemu produkcyjnego zaprojektowane w zewnętrznych aplikacjach CAD.