| Autor: | Dominik Ciślak |
| Promotor: | dr hab. inż. Jerzy Zając, prof. PK |
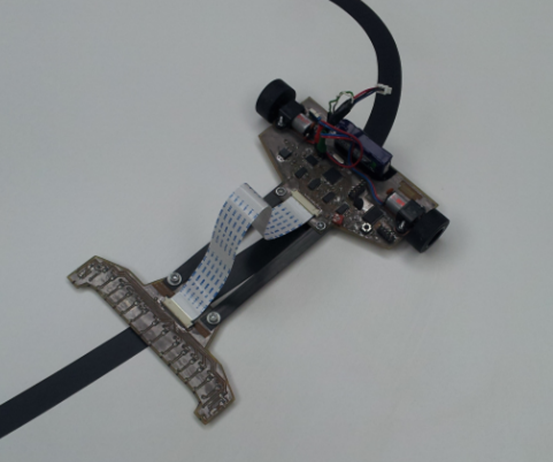
Celem pracy magisterskiej było przeprojektowanie oraz gruntowna przebudowa robota mobilnego do konkurencji Line Follower powstałego na potrzeby pracy inżynierskiej autora oraz opracowanie dedykowanej aplikacji na platformę Android służącej do sterowania konstrukcją. Wykorzystując doświadczenia zdobyte przy budowie poprzedniej wersji konstrukcji oraz obserwacje pomysłów konstruktorskich czołowych polskich zawodników konkurencji Line Follower, ustalono następujące wymagania, które wykorzystano przy budowie nowej wersji robota:
- kształt listwy z czujnikami odbiciowymi powinien przypominać łuk – dla lepszego wykrywania zakrętów pod kątem prostym
- liczba czujników powinna być możliwie wysoka – dla zapewnienia jak najlepszej rozdzielczości odczytu
- zastosowanie gotowych modułów mikroprocesorowych pomoże uniknąć mikro zwarć oraz częstych niedomagań elektronicznych
- o komunikacji najlepiej zastosować technologie pozwalające na szybką i sprawdzoną komunikację dwustronną (WIFI, Bluetooth, LTE)
- korzystanie z szeroko opisanych technik optymalizacji oprogramowania pozwoli na efektywne wykorzystanie zasobów sprzętowych oraz ograniczenie wycieków pamięci czy zbyt długo działających pętli
- zastosowanie mechanizmów samo strojenia powinno ułatwić operatorowi robota start w zawodach.