| Autorzy: | Dariusz Biega |
| Promotor: | dr hab. inż. Jerzy Zając, prof. PK |
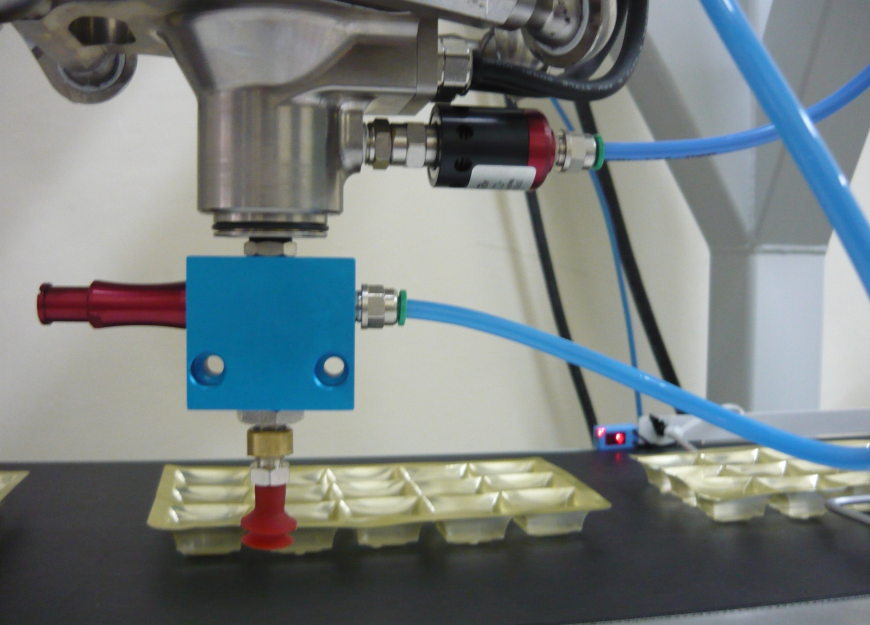
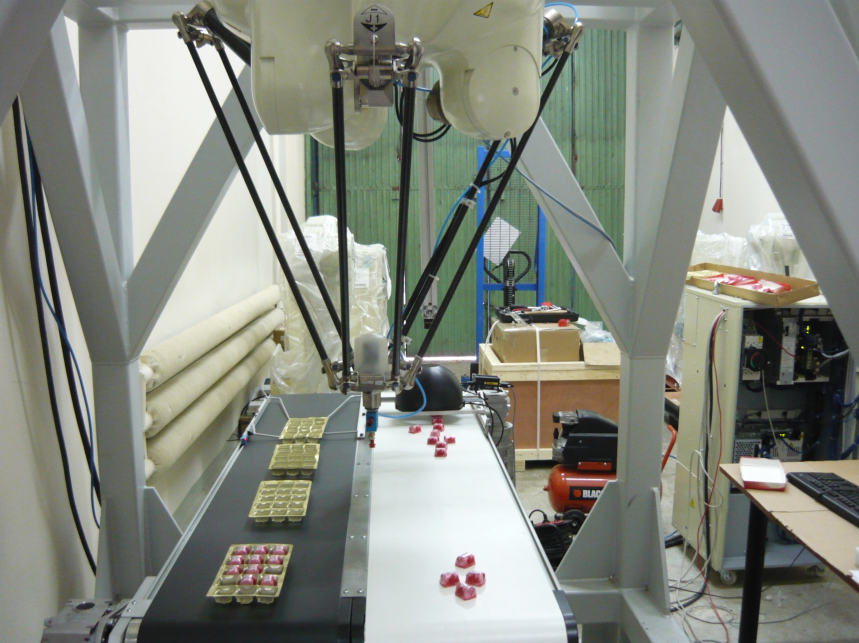
Zasadniczym celem pracy jest przeanalizowanie wydajności i zysków wynikających z wykorzystania zrobotyzowanej obsługi linii typu Pick & Place w przemyśle spożywczym w fabryce FERRERO ROCHER. Została zaprojektowana i wykonana aplikacja pilotażowa z wykorzystaniem robota Kawasaki YF003N i systemu wizyjnego, która ma na celu wykazanie zasadności zastosowania robota do pakowania czekoladek w blistrach. Proces polega na automatycznym pakowaniu małych czekoladek do pustych blistrów bombonierek transportowanych na przenośnikach taśmowych. Na etapie projektowania wzięto pod uwagę różne koncepcje budowy stanowiska. Przeprowadzona analiza ekonomiczna pozwoliła na uzyskanie odpowiedzi na pytanie „czy, a jeżeli tak, to przy jakich parametrach zastosowanie zrobotyzowanej linii obsługi pakowania typu Pick & Place w przemyśle spożywczym jest uzasadnione”?